 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeuPLAM: Robust Panoptic Localization and Mapping Leveraging Perception Uncertainties
Paper and Code
Feb 08, 2024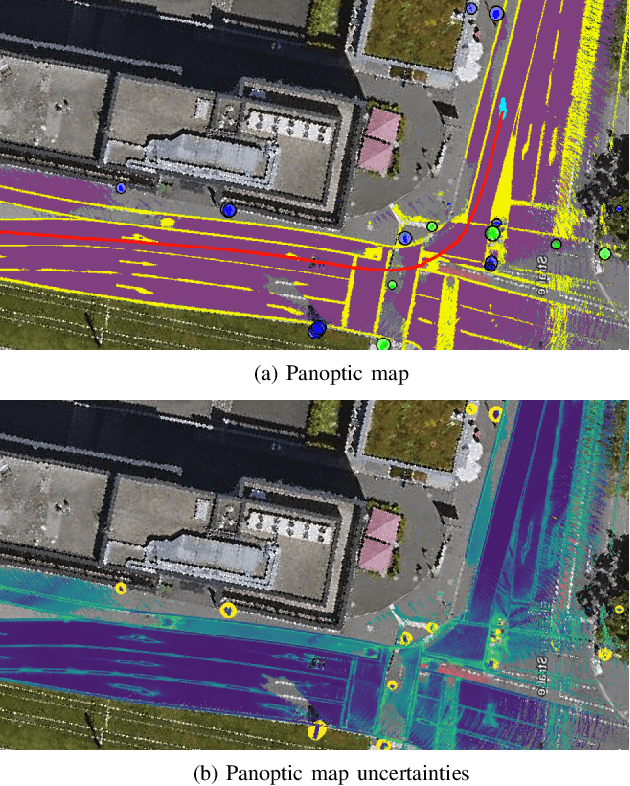

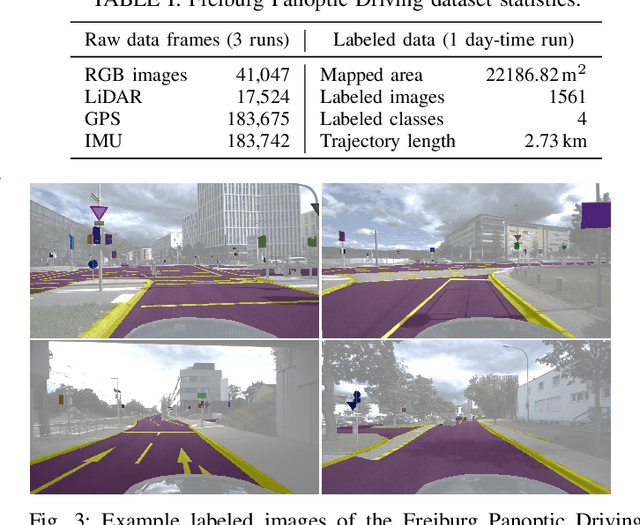

The availability of a reliable map and a robust localization system is critical for the operation of an autonomous vehicle. In a modern system, both mapping and localization solutions generally employ convolutional neural network (CNN) --based perception. Hence, any algorithm should consider potential errors in perception for safe and robust functioning. In this work, we present uncertainty-aware panoptic Localization and Mapping (uPLAM), which employs perception uncertainty as a bridge to fuse the perception information with classical localization and mapping approaches. We introduce an uncertainty-based map aggregation technique to create a long-term panoptic bird's eye view map and provide an associated mapping uncertainty. Our map consists of surface semantics and landmarks with unique IDs. Moreover, we present panoptic uncertainty-aware particle filter-based localization. To this end, we propose an uncertainty-based particle importance weight calculation for the adaptive incorporation of perception information into localization. We also present a new dataset for evaluating long-term panoptic mapping and map-based localization. Extensive evaluations showcase that our proposed uncertainty incorporation leads to better mapping with reliable uncertainty estimates and accurate localization. We make our dataset and code available at: \url{http://uplam.cs.uni-freiburg.de}