 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Single-shot Depth Estimation using Perceptual Reconstruction
Paper and Code
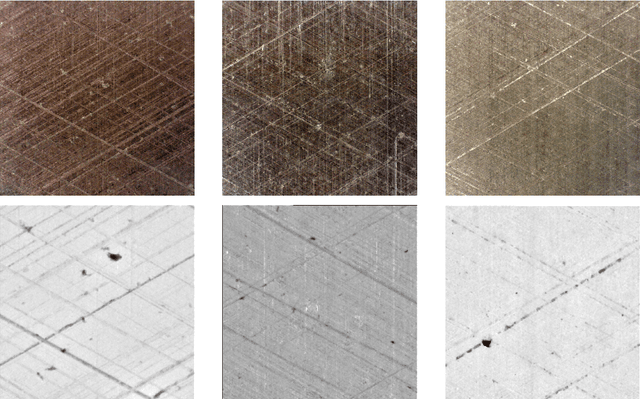

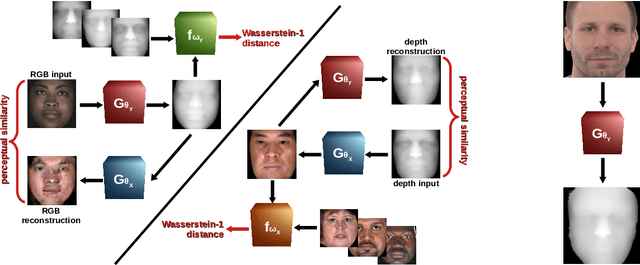

Real-time estimation of actual object depth is a module that is essential to performing various autonomous system tasks such as 3D reconstruction, scene understanding and condition assessment of machinery parts. During the last decade of machine learning, extensive deployment of deep learning methods to computer vision tasks has yielded approaches that succeed in achieving realistic depth synthesis out of a simple RGB modality. While most of these models are based on paired depth data or availability of video sequences and stereo images, methods for single-view depth synthesis in a fully unsupervised setting have hardly been explored. This study presents the most recent advances in the field of generative neural networks, leveraging them to perform fully unsupervised single-shot depth synthesis. Two generators for RGB-to-depth and depth-to-RGB transfer are implemented and simultaneously optimized using the Wasserstein-1 distance and a novel perceptual reconstruction term. To ensure that the proposed method is plausible, we comprehensively evaluate the models using industrial surface depth data as well as the Texas 3D Face Recognition Database and the SURREAL dataset that records body depth. The success observed in this study suggests the great potential for unsupervised single-shot depth estimation in real-world applications.