 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnifying Event-based Flow, Stereo and Depth Estimation via Feature Similarity Matching
Paper and Code
Jul 31, 2024
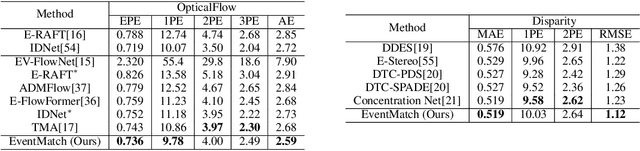


As an emerging vision sensor, the event camera has gained popularity in various vision tasks such as optical flow estimation, stereo matching, and depth estimation due to its high-speed, sparse, and asynchronous event streams. Unlike traditional approaches that use specialized architectures for each specific task, we propose a unified framework, EventMatch, that reformulates these tasks as an event-based dense correspondence matching problem, allowing them to be solved with a single model by directly comparing feature similarities. By utilizing a shared feature similarities module, which integrates knowledge from other event flows via temporal or spatial interactions, and distinct task heads, our network can concurrently perform optical flow estimation from temporal inputs (e.g., two segments of event streams in the temporal domain) and stereo matching from spatial inputs (e.g., two segments of event streams from different viewpoints in the spatial domain). Moreover, we further demonstrate that our unified model inherently supports cross-task transfer since the architecture and parameters are shared across tasks. Without the need for retraining on each task, our model can effectively handle both optical flow and disparity estimation simultaneously. The experiment conducted on the DSEC benchmark demonstrates that our model exhibits superior performance in both optical flow and disparity estimation tasks, outperforming existing state-of-the-art methods. Our unified approach not only advances event-based models but also opens new possibilities for cross-task transfer and inter-task fusion in both spatial and temporal dimensions. Our code will be available later.