 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater Surveying via Bearing only Cooperative Localization
Paper and Code
Sep 10, 2018

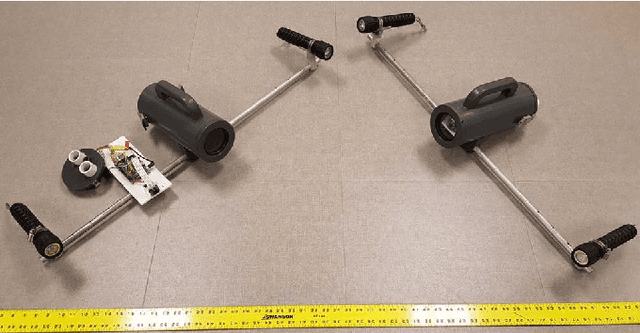

Bearing only cooperative localization has been used successfully on aerial and ground vehicles. In this paper we present an extension of the approach to the underwater domain. The focus is on adapting the technique to handle the challenging visibility conditions underwater. Furthermore, data from inertial, magnetic, and depth sensors are utilized to improve the robustness of the estimation. In addition to robotic applications, the presented technique can be used for cave mapping and for marine archeology surveying, both by human divers. Experimental results from different environments, including a fresh water, low visibility, lake in South Carolina; a cavern in Florida; and coral reefs in Barbados during the day and during the night, validate the robustness and the accuracy of the proposed approach.