Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderactuated Waypoint Trajectory Optimization for Light Painting Photography
Paper and Code
Mar 03, 2020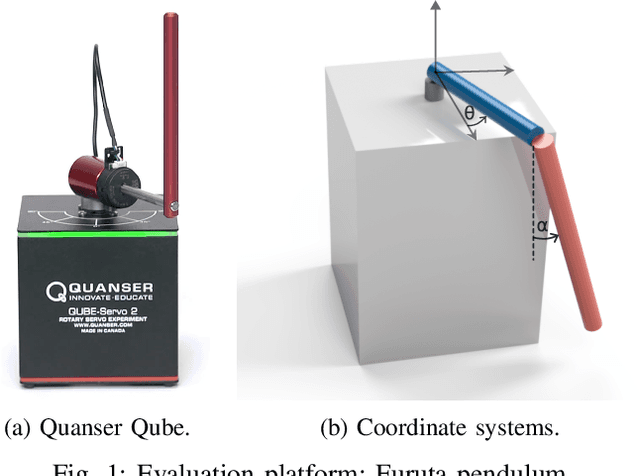
Despite their abundance in robotics and nature, underactuated systems remain a challenge for control engineering. Trajectory optimization provides a generally applicable solution, however its efficiency strongly depends on the skill of the engineer to frame the problem in an optimizer-friendly way. This paper proposes a procedure that automates such problem reformulation for a class of tasks in which the desired trajectory is specified by a sequence of waypoints. The approach is based on introducing auxiliary optimization variables that represent waypoint activations. To validate the proposed method, a letter drawing task is set up where shapes traced by the tip of a rotary inverted pendulum are visualized using long exposure photography.
* Accepted for ICRA 2020 (International Conference on Robotics and
Automation)
View paper on