 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Aware Multitask Pyramid Vision Transformer For UAV-Based Object Re-Identification
Paper and Code
Sep 19, 2022
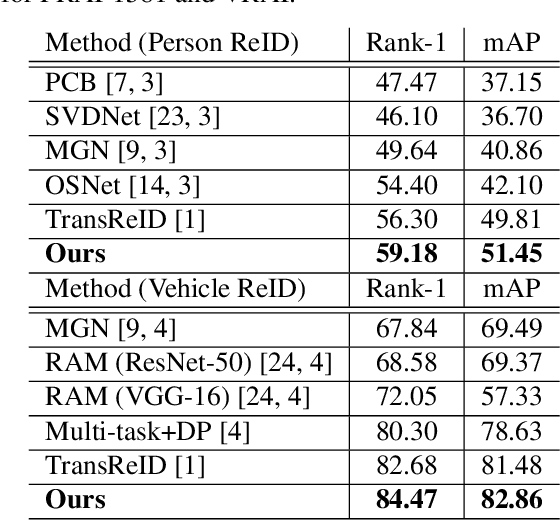
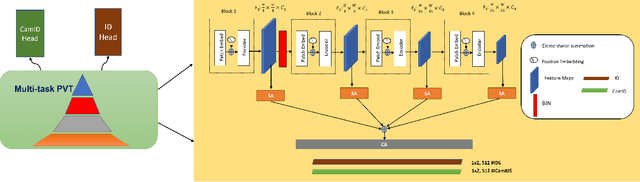
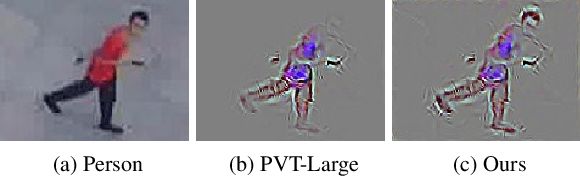
Object Re-IDentification (ReID), one of the most significant problems in biometrics and surveillance systems, has been extensively studied by image processing and computer vision communities in the past decades. Learning a robust and discriminative feature representation is a crucial challenge for object ReID. The problem is even more challenging in ReID based on Unmanned Aerial Vehicle (UAV) as the images are characterized by continuously varying camera parameters (e.g., view angle, altitude, etc.) of a flying drone. To address this challenge, multiscale feature representation has been considered to characterize images captured from UAV flying at different altitudes. In this work, we propose a multitask learning approach, which employs a new multiscale architecture without convolution, Pyramid Vision Transformer (PVT), as the backbone for UAV-based object ReID. By uncertainty modeling of intraclass variations, our proposed model can be jointly optimized using both uncertainty-aware object ID and camera ID information. Experimental results are reported on PRAI and VRAI, two ReID data sets from aerial surveillance, to verify the effectiveness of our proposed approach