 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Lidar Place Recognition in Novel Environments
Paper and Code
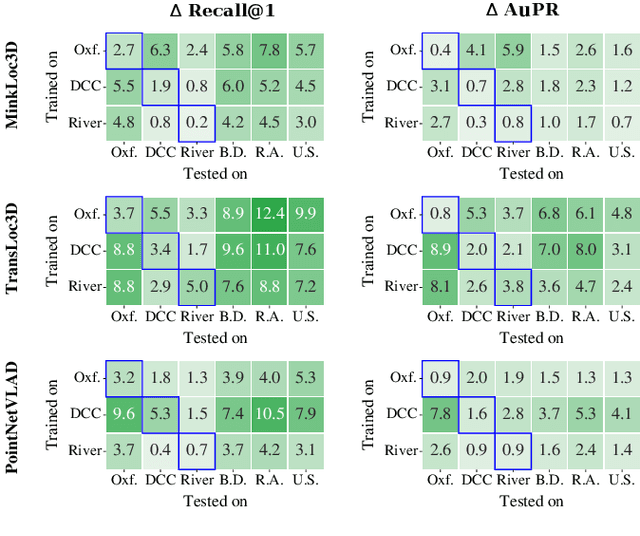
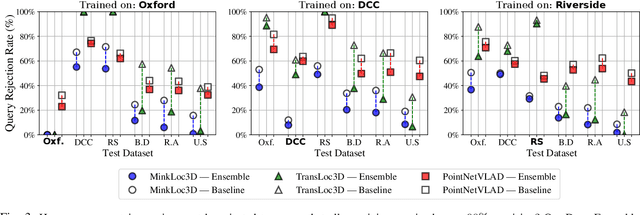
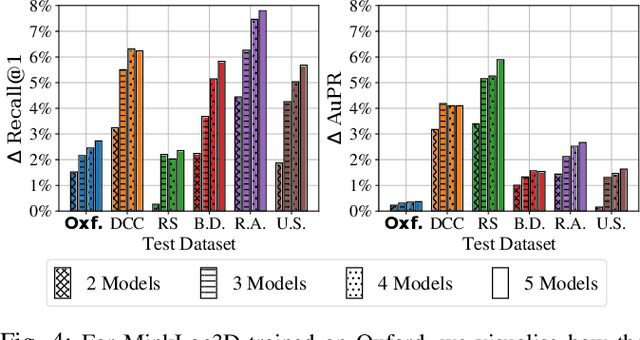
State-of-the-art approaches to lidar place recognition degrade significantly when tested on novel environments that are not present in their training dataset. To improve their reliability, we propose uncertainty-aware lidar place recognition, where each predicted place match must have an associated uncertainty that can be used to identify and reject potentially incorrect matches. We introduce a novel evaluation protocol designed to benchmark uncertainty-aware lidar place recognition, and present Deep Ensembles as the first uncertainty-aware approach for this task. Testing across three large-scale datasets and three state-of-the-art architectures, we show that Deep Ensembles consistently improves the performance of lidar place recognition in novel environments. Compared to a standard network, our results show that Deep Ensembles improves the Recall@1 by more than 5% and AuPR by more than 3% on average when tested on previously unseen environments. Our code repository will be made publicly available upon paper acceptance at https://github.com/csiro-robotics/Uncertainty-LPR.