 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMono: Physical Model Informed Hybrid CNN-Transformer Framework for Underwater Monocular Depth Estimation
Paper and Code
Jul 25, 2024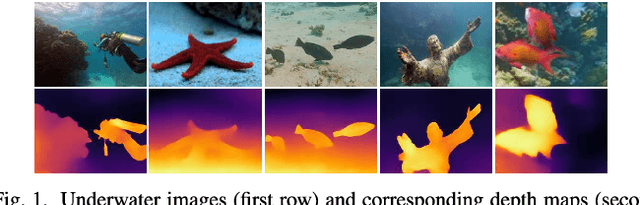

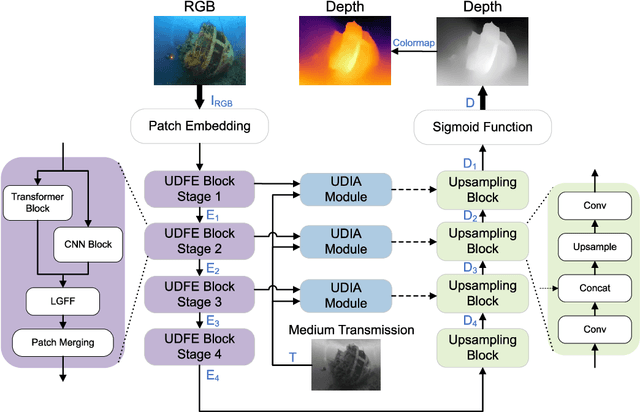

Underwater monocular depth estimation serves as the foundation for tasks such as 3D reconstruction of underwater scenes. However, due to the influence of light and medium, the underwater environment undergoes a distinctive imaging process, which presents challenges in accurately estimating depth from a single image. The existing methods fail to consider the unique characteristics of underwater environments, leading to inadequate estimation results and limited generalization performance. Furthermore, underwater depth estimation requires extracting and fusing both local and global features, which is not fully explored in existing methods. In this paper, an end-to-end learning framework for underwater monocular depth estimation called UMono is presented, which incorporates underwater image formation model characteristics into network architecture, and effectively utilize both local and global features of underwater image. Experimental results demonstrate that the proposed method is effective for underwater monocular depth estimation and outperforms the existing methods in both quantitative and qualitative analyses.