 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
Paper and Code
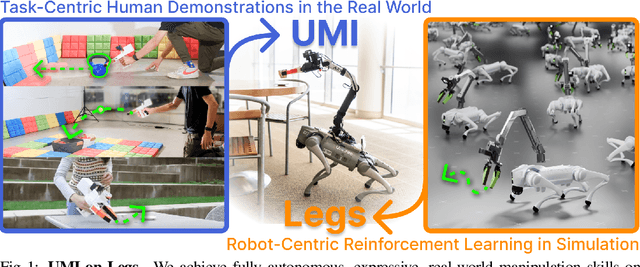
We introduce UMI-on-Legs, a new framework that combines real-world and simulation data for quadruped manipulation systems. We scale task-centric data collection in the real world using a hand-held gripper (UMI), providing a cheap way to demonstrate task-relevant manipulation skills without a robot. Simultaneously, we scale robot-centric data in simulation by training whole-body controller for task-tracking without task simulation setups. The interface between these two policies is end-effector trajectories in the task frame, inferred by the manipulation policy and passed to the whole-body controller for tracking. We evaluate UMI-on-Legs on prehensile, non-prehensile, and dynamic manipulation tasks, and report over 70% success rate on all tasks. Lastly, we demonstrate the zero-shot cross-embodiment deployment of a pre-trained manipulation policy checkpoint from prior work, originally intended for a fixed-base robot arm, on our quadruped system. We believe this framework provides a scalable path towards learning expressive manipulation skills on dynamic robot embodiments. Please checkout our website for robot videos, code, and data: https://umi-on-legs.github.io