 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeU-ARE-ME: Uncertainty-Aware Rotation Estimation in Manhattan Environments
Paper and Code
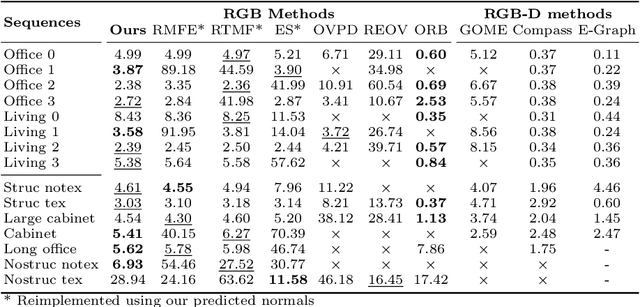
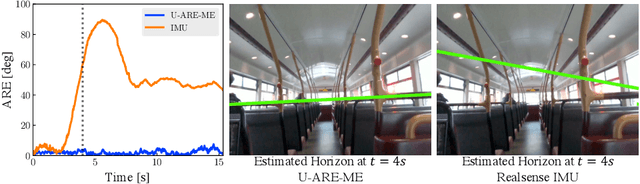

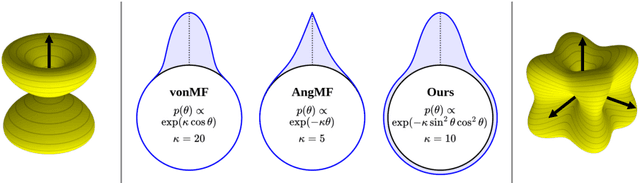
Camera rotation estimation from a single image is a challenging task, often requiring depth data and/or camera intrinsics, which are generally not available for in-the-wild videos. Although external sensors such as inertial measurement units (IMUs) can help, they often suffer from drift and are not applicable in non-inertial reference frames. We present U-ARE-ME, an algorithm that estimates camera rotation along with uncertainty from uncalibrated RGB images. Using a Manhattan World assumption, our method leverages the per-pixel geometric priors encoded in single-image surface normal predictions and performs optimisation over the SO(3) manifold. Given a sequence of images, we can use the per-frame rotation estimates and their uncertainty to perform multi-frame optimisation, achieving robustness and temporal consistency. Our experiments demonstrate that U-ARE-ME performs comparably to RGB-D methods and is more robust than sparse feature-based SLAM methods. We encourage the reader to view the accompanying video at https://callum-rhodes.github.io/U-ARE-ME for a visual overview of our method.