Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTutoring Reinforcement Learning via Feedback Control
Paper and Code
Dec 12, 2020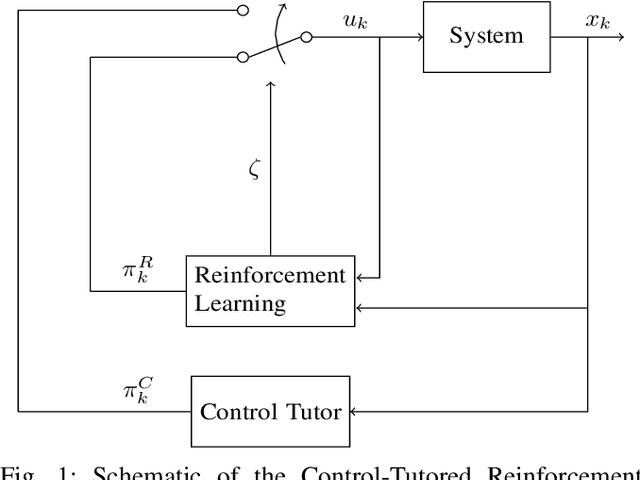
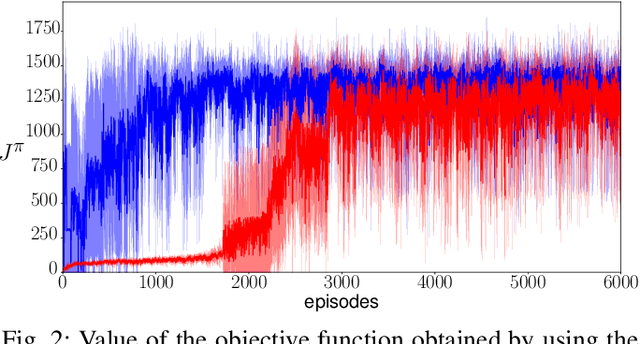
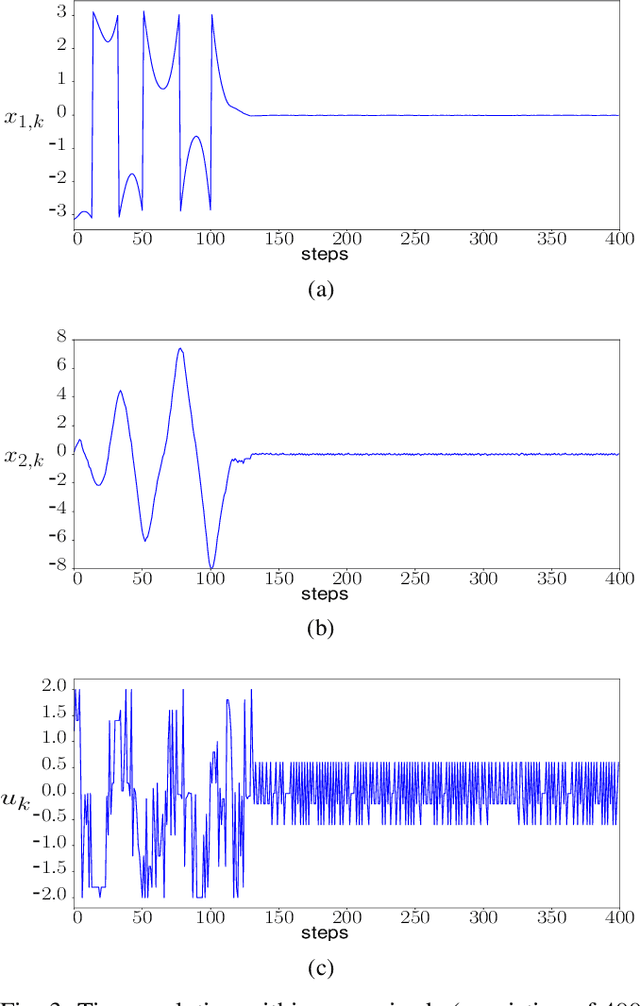
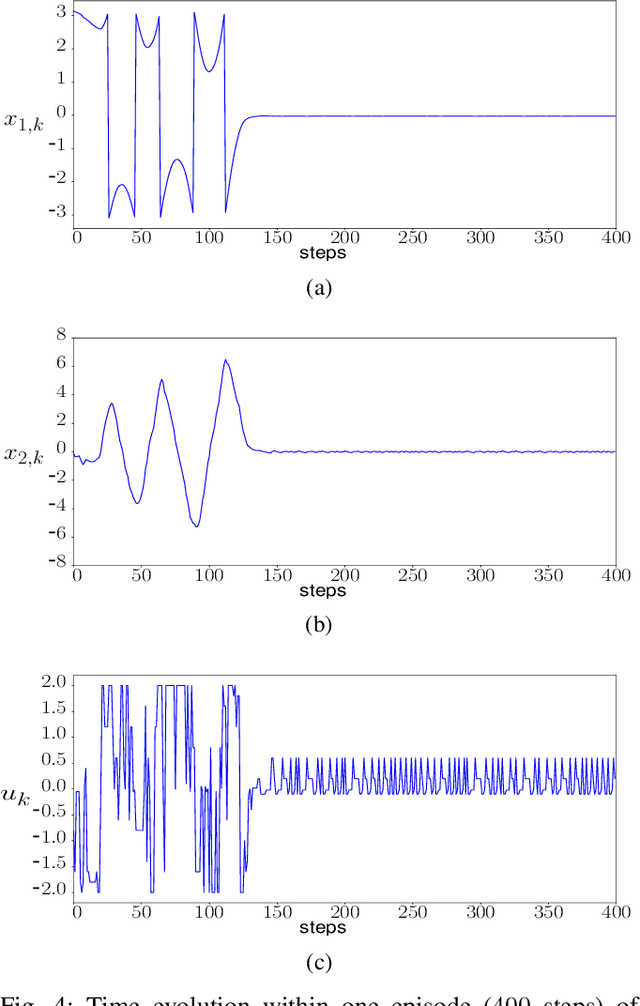
We introduce a control-tutored reinforcement learning (CTRL) algorithm. The idea is to enhance tabular learning algorithms by means of a control strategy with limited knowledge of the system model. By tutoring the learning process, the learning rate can be substantially reduced. We use the classical problem of stabilizing an inverted pendulum as a benchmark to numerically illustrate the advantages and disadvantages of the approach.
View paper on