 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrueRMA: Learning Fast and Smooth Robot Trajectories with Recursive Midpoint Adaptations in Cartesian Space
Paper and Code
Jun 05, 2020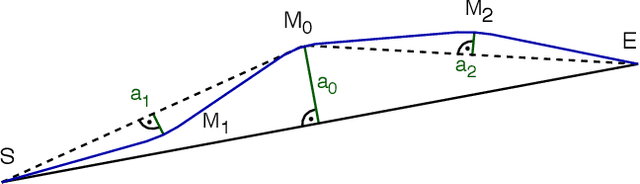
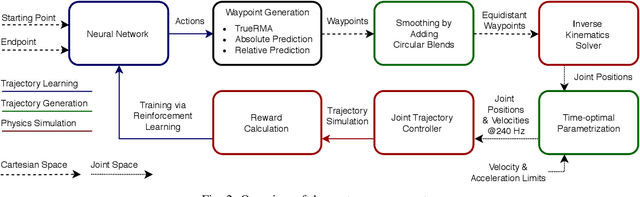
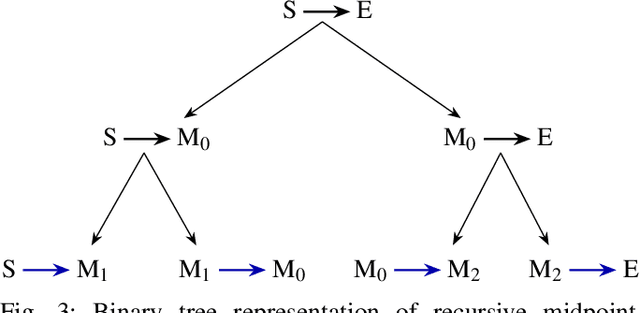
We present TrueRMA, a data-efficient, model-free method to learn cost-optimized robot trajectories over a wide range of starting points and endpoints. The key idea is to calculate trajectory waypoints in Cartesian space by recursively predicting orthogonal adaptations relative to the midpoints of straight lines. We generate a differentiable path by adding circular blends around the waypoints, calculate the corresponding joint positions with an inverse kinematics solver and calculate a time-optimal parameterization considering velocity and acceleration limits. During training, the trajectory is executed in a physics simulator and costs are assigned according to a user-specified cost function which is not required to be differentiable. Given a starting point and an endpoint as input, a neural network is trained to predict midpoint adaptations that minimize the cost of the resulting trajectory via reinforcement learning. We successfully train a KUKA iiwa robot to keep a ball on a plate while moving between specified points and compare the performance of TrueRMA against two baselines. The results show that our method requires less training data to learn the task while generating shorter and faster trajectories.