 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrueAdapt: Learning Smooth Online Trajectory Adaptation with Bounded Jerk, Acceleration and Velocity in Joint Space
Paper and Code
May 30, 2020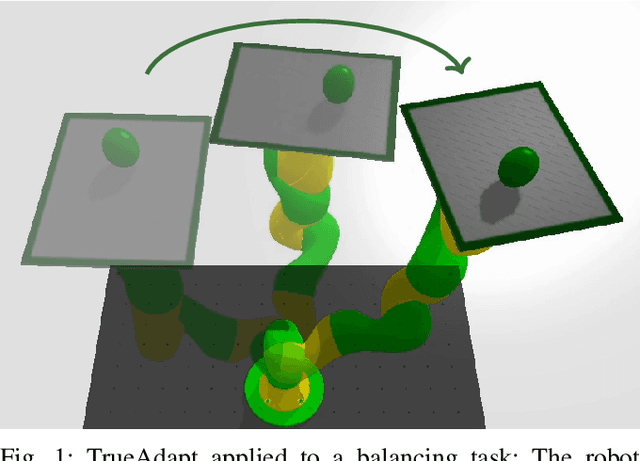
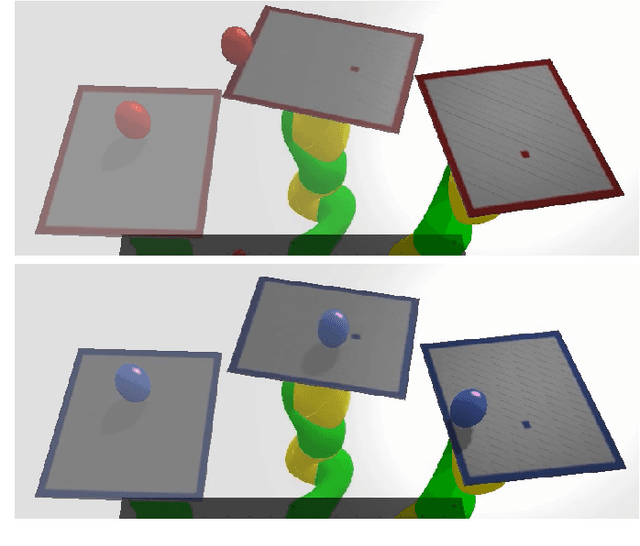

We present TrueAdapt, a model-free method to learn online adaptations of robot trajectories based on their effects on the environment. Given sensory feedback and future waypoints of the original trajectory, a neural network is trained to predict joint accelerations at regular intervals. The adapted trajectory is generated by linear interpolation of the predicted accelerations, leading to continuously differentiable joint velocities and positions. Bounded jerks, accelerations and velocities are guaranteed by calculating the valid acceleration range at each decision step and clipping the network's output accordingly. A deviation penalty during the training process causes the adapted trajectory to follow the original one. Smooth movements are encouraged by penalizing high accelerations and jerks. We evaluate our approach by training a simulated KUKA iiwa robot to balance a ball on a plate while moving and demonstrate that the balancing policy can be directly transferred to a real robot with little impact on performance.