 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriple Regression for Camera Agnostic Sim2Real Robot Grasping and Manipulation Tasks
Paper and Code
Sep 16, 2023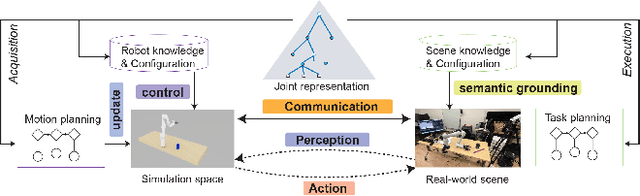
Sim2Real (Simulation to Reality) techniques have gained prominence in robotic manipulation and motion planning due to their ability to enhance success rates by enabling agents to test and evaluate various policies and trajectories. In this paper, we investigate the advantages of integrating Sim2Real into robotic frameworks. We introduce the Triple Regression Sim2Real framework, which constructs a real-time digital twin. This twin serves as a replica of reality to simulate and evaluate multiple plans before their execution in real-world scenarios. Our triple regression approach addresses the reality gap by: (1) mitigating projection errors between real and simulated camera perspectives through the first two regression models, and (2) detecting discrepancies in robot control using the third regression model. Experiments on 6-DoF grasp and manipulation tasks (where the gripper can approach from any direction) highlight the effectiveness of our framework. Remarkably, with only RGB input images, our method achieves state-of-the-art success rates. This research advances efficient robot training methods and sets the stage for rapid advancements in robotics and automation.