 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriplane Grasping: Efficient 6-DoF Grasping with Single RGB Images
Paper and Code
Oct 21, 2024

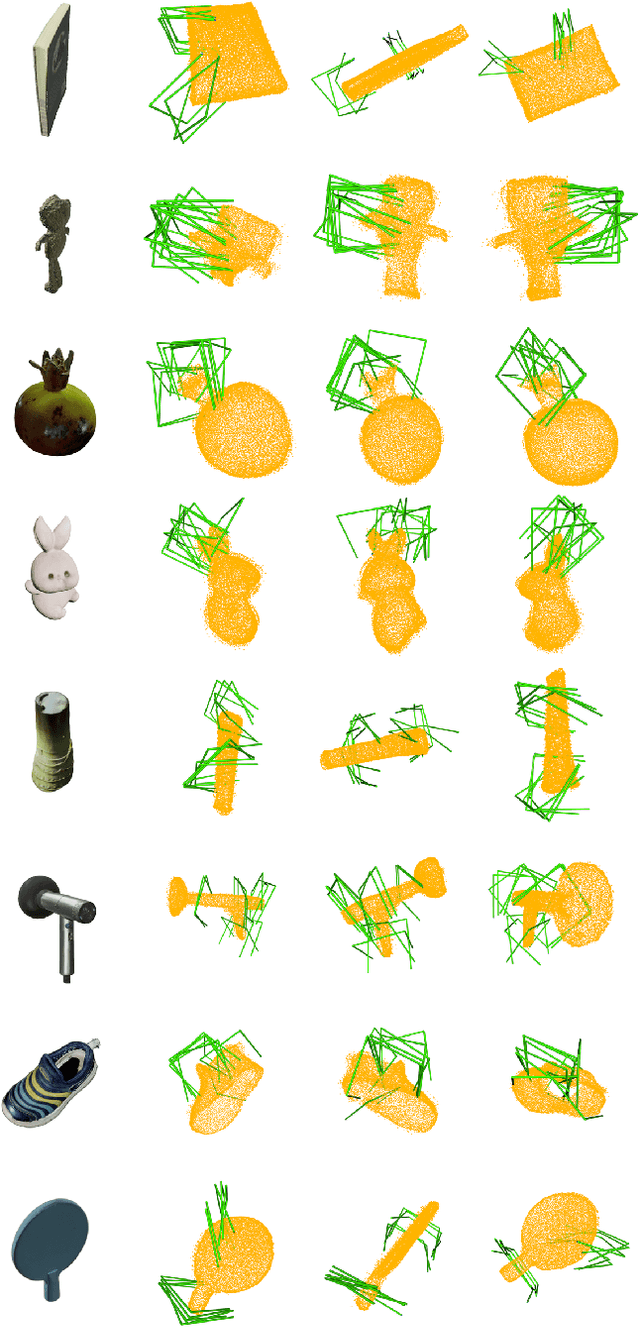
Reliable object grasping is one of the fundamental tasks in robotics. However, determining grasping pose based on single-image input has long been a challenge due to limited visual information and the complexity of real-world objects. In this paper, we propose Triplane Grasping, a fast grasping decision-making method that relies solely on a single RGB-only image as input. Triplane Grasping creates a hybrid Triplane-Gaussian 3D representation through a point decoder and a triplane decoder, which produce an efficient and high-quality reconstruction of the object to be grasped to meet real-time grasping requirements. We propose to use an end-to-end network to generate 6-DoF parallel-jaw grasp distributions directly from 3D points in the point cloud as potential grasp contacts and anchor the grasp pose in the observed data. Experiments demonstrate that our method achieves rapid modeling and grasping pose decision-making for daily objects, and exhibits a high grasping success rate in zero-shot scenarios.