 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTree Annotations in LiDAR Data Using Point Densities and Convolutional Neural Networks
Paper and Code
Jun 09, 2020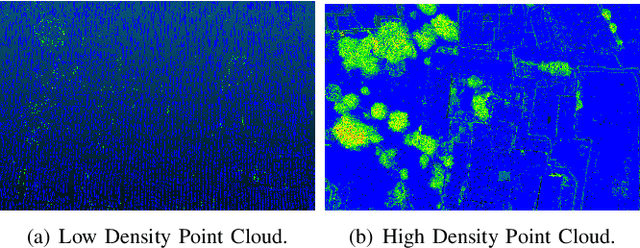
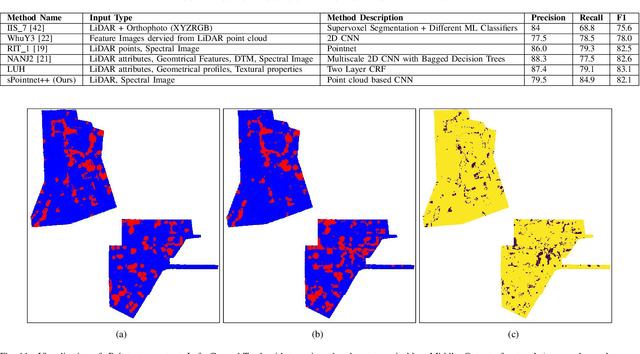
LiDAR provides highly accurate 3D point clouds. However, data needs to be manually labelled in order to provide subsequent useful information. Manual annotation of such data is time consuming, tedious and error prone, and hence in this paper we present three automatic methods for annotating trees in LiDAR data. The first method requires high density point clouds and uses certain LiDAR data attributes for the purpose of tree identification, achieving almost 90% accuracy. The second method uses a voxel-based 3D Convolutional Neural Network on low density LiDAR datasets and is able to identify most large trees accurately but struggles with smaller ones due to the voxelisation process. The third method is a scaled version of the PointNet++ method and works directly on outdoor point clouds and achieves an F_score of 82.1% on the ISPRS benchmark dataset, comparable to the state-of-the-art methods but with increased efficiency.