 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTranslation of "Zur Ermittlung eines Objektes aus zwei Perspektiven mit innerer Orientierung" by Erwin Kruppa (1913)
Paper and Code
Dec 25, 2017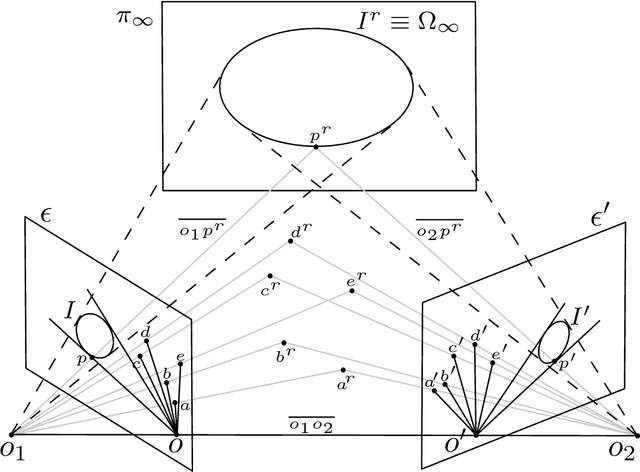
Erwin Kruppa's 1913 paper, Erwin Kruppa, "Zur Ermittlung eines Objektes aus zwei Perspektiven mit innerer Orientierung", Sitzungsberichte der Mathematisch-Naturwissenschaftlichen Kaiserlichen Akademie der Wissenschaften, Vol. 122 (1913), pp. 1939-1948, which may be translated as "To determine a 3D object from two perspective views with known inner orientation", is a landmark paper in Computer Vision because it provides the first five-point algorithm for relative pose estimation. Kruppa showed that (a finite number of solutions for) the relative pose between two calibrated images of a rigid object can be computed from five point matches between the images. Kruppa's work also gained attention in the topic of camera self-calibration, as presented in (Maybank and Faugeras, 1992). Since the paper is still relevant today (more than a hundred citations within the last ten years) and the paper is not available online, we ordered a copy from the German National Library in Frankfurt and provide an English translation along with the German original. We also adapt the terminology to a modern jargon and provide some clarifications (highlighted in sans-serif font). For a historical review of geometric computer vision, the reader is referred to the recent survey paper (Sturm, 2011).