 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransDreamer: Reinforcement Learning with Transformer World Models
Paper and Code
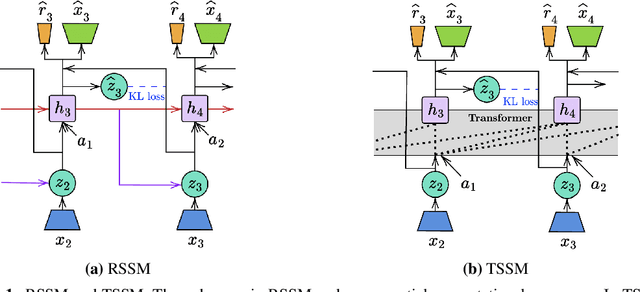
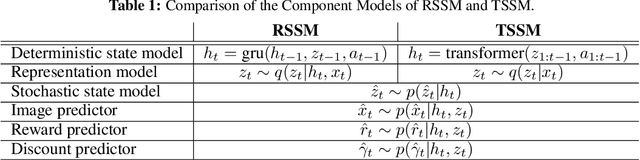
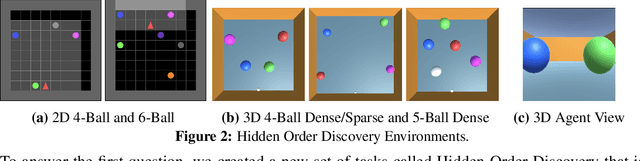
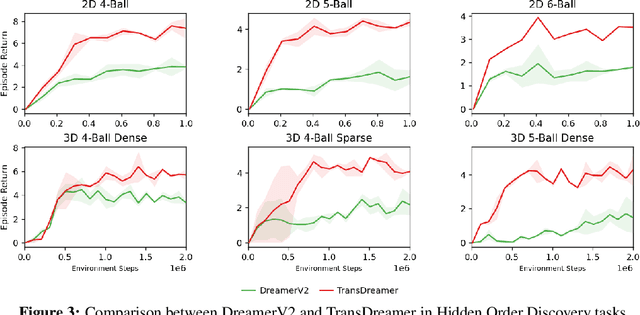
The Dreamer agent provides various benefits of Model-Based Reinforcement Learning (MBRL) such as sample efficiency, reusable knowledge, and safe planning. However, its world model and policy networks inherit the limitations of recurrent neural networks and thus an important question is how an MBRL framework can benefit from the recent advances of transformers and what the challenges are in doing so. In this paper, we propose a transformer-based MBRL agent, called TransDreamer. We first introduce the Transformer State-Space Model, a world model that leverages a transformer for dynamics predictions. We then share this world model with a transformer-based policy network and obtain stability in training a transformer-based RL agent. In experiments, we apply the proposed model to 2D visual RL and 3D first-person visual RL tasks both requiring long-range memory access for memory-based reasoning. We show that the proposed model outperforms Dreamer in these complex tasks.