 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajformer: Trajectory Prediction with Local Self-Attentive Contexts for Autonomous Driving
Paper and Code
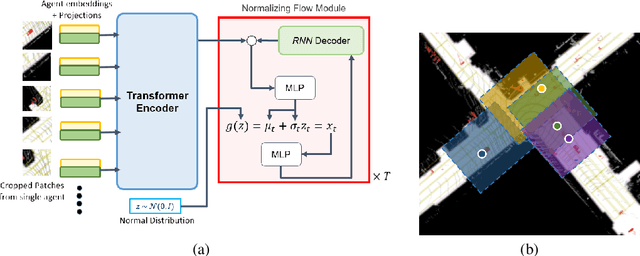
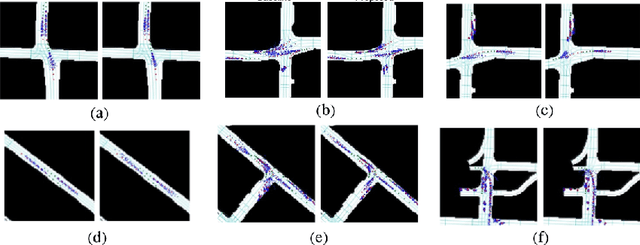
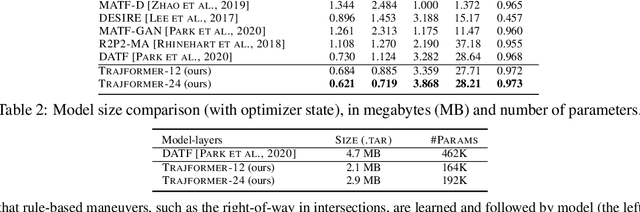
Effective feature-extraction is critical to models' contextual understanding, particularly for applications to robotics and autonomous driving, such as multimodal trajectory prediction. However, state-of-the-art generative methods face limitations in representing the scene context, leading to predictions of inadmissible futures. We alleviate these limitations through the use of self-attention, which enables better control over representing the agent's social context; we propose a local feature-extraction pipeline that produces more salient information downstream, with improved parameter efficiency. We show improvements on standard metrics (minADE, minFDE, DAO, DAC) over various baselines on the Argoverse dataset. We release our code at: https://github.com/Manojbhat09/Trajformer