 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectoTree: Trajectory Optimization Meets Tree Search for Planning Multi-contact Dexterous Manipulation
Paper and Code
Sep 28, 2021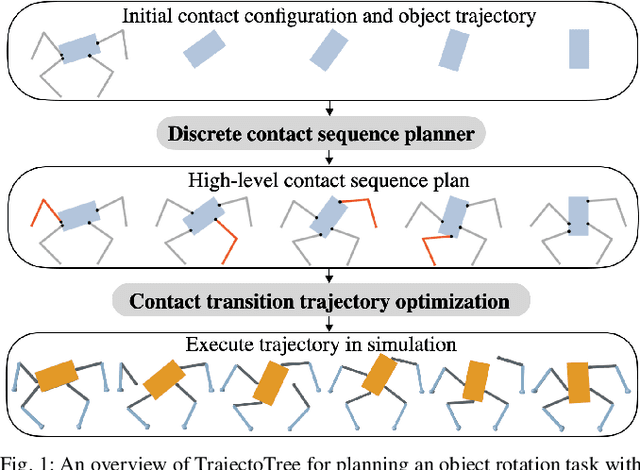
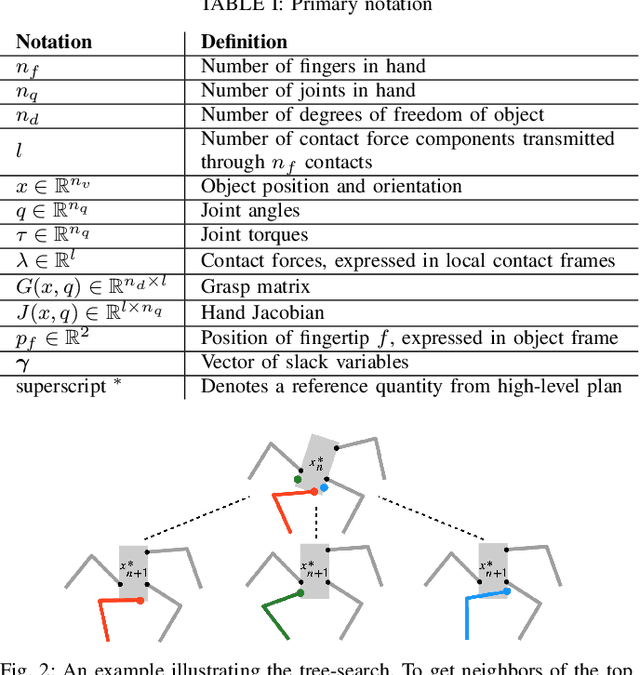
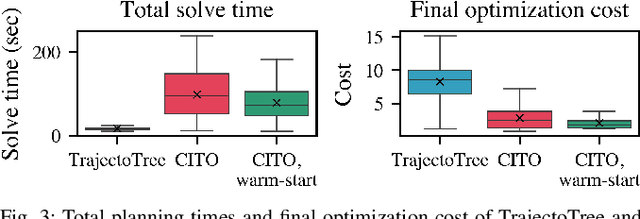

Dexterous manipulation tasks often require contact switching, where fingers make and break contact with the object. We propose a method that plans trajectories for dexterous manipulation tasks involving contact switching using contact-implicit trajectory optimization (CITO) augmented with a high-level discrete contact sequence planner. We first use the high-level planner to find a sequence of finger contact switches given a desired object trajectory. With this contact sequence plan, we impose additional constraints in the CITO problem. We show that our method finds trajectories approximately 7 times faster than a general CITO baseline for a four-finger planar manipulation scenario. Furthermore, when executing the planned trajectories in a full dynamics simulator, we are able to more closely track the object pose trajectories planned by our method than those planned by the baselines.