 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for Physics-Based Reconstruction of 3d Human Pose from Monocular Video
Paper and Code
May 24, 2022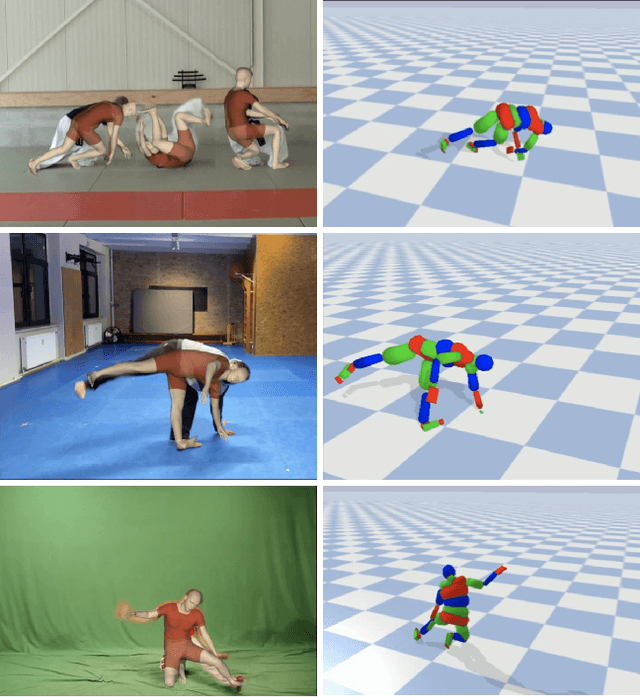
We focus on the task of estimating a physically plausible articulated human motion from monocular video. Existing approaches that do not consider physics often produce temporally inconsistent output with motion artifacts, while state-of-the-art physics-based approaches have either been shown to work only in controlled laboratory conditions or consider simplified body-ground contact limited to feet. This paper explores how these shortcomings can be addressed by directly incorporating a fully-featured physics engine into the pose estimation process. Given an uncontrolled, real-world scene as input, our approach estimates the ground-plane location and the dimensions of the physical body model. It then recovers the physical motion by performing trajectory optimization. The advantage of our formulation is that it readily generalizes to a variety of scenes that might have diverse ground properties and supports any form of self-contact and contact between the articulated body and scene geometry. We show that our approach achieves competitive results with respect to existing physics-based methods on the Human3.6M benchmark, while being directly applicable without re-training to more complex dynamic motions from the AIST benchmark and to uncontrolled internet videos.