 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining a Convolutional Neural Network for Appearance-Invariant Place Recognition
Paper and Code
May 27, 2015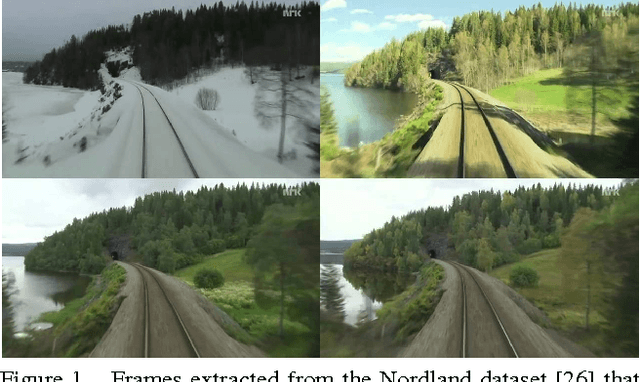

Place recognition is one of the most challenging problems in computer vision, and has become a key part in mobile robotics and autonomous driving applications for performing loop closure in visual SLAM systems. Moreover, the difficulty of recognizing a revisited location increases with appearance changes caused, for instance, by weather or illumination variations, which hinders the long-term application of such algorithms in real environments. In this paper we present a convolutional neural network (CNN), trained for the first time with the purpose of recognizing revisited locations under severe appearance changes, which maps images to a low dimensional space where Euclidean distances represent place dissimilarity. In order for the network to learn the desired invariances, we train it with triplets of images selected from datasets which present a challenging variability in visual appearance. The triplets are selected in such way that two samples are from the same location and the third one is taken from a different place. We validate our system through extensive experimentation, where we demonstrate better performance than state-of-art algorithms in a number of popular datasets.