 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Partially-Occluded Deformable Objects while Enforcing Geometric Constraints
Paper and Code

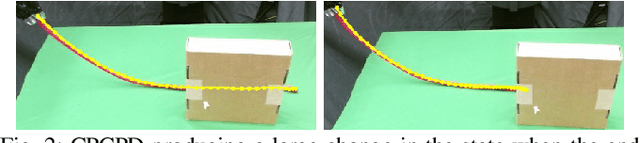

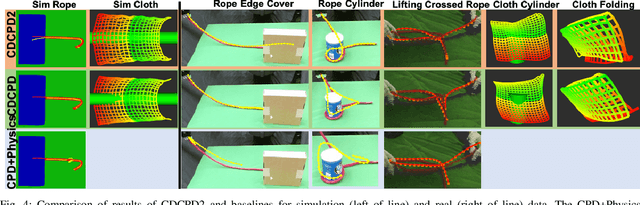
In order to manipulate a deformable object, such as rope or cloth, in unstructured environments, robots need a way to estimate its current shape. However, tracking the shape of a deformable object can be challenging because of the object's high flexibility, (self-)occlusion, and interaction with obstacles. Building a high-fidelity physics simulation to aid in tracking is difficult for novel environments. Instead we focus on tracking the object based on RGBD images and geometric motion estimates and obstacles. Our key contributions over previous work in this vein are: 1) A better way to handle severe occlusion by using a motion model to regularize the tracking estimate; and 2) The formulation of \textit{convex} geometric constraints, which allow us to prevent self-intersection and penetration into known obstacles via a post-processing step. These contributions allow us to outperform previous methods by a large margin in terms of accuracy in scenarios with severe occlusion and obstacles.