 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking-Assisted Object Detection with Event Cameras
Paper and Code
Mar 27, 2024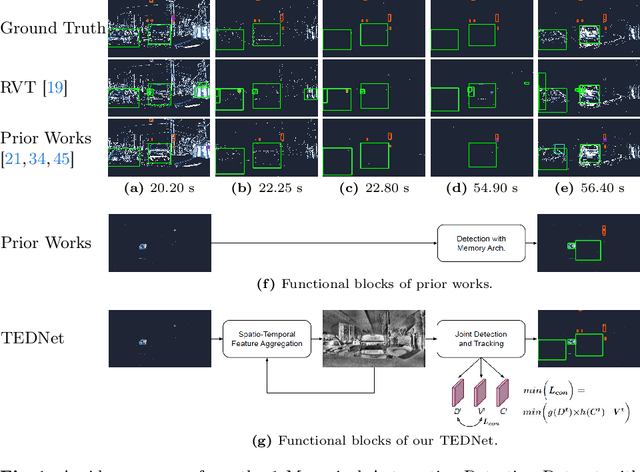
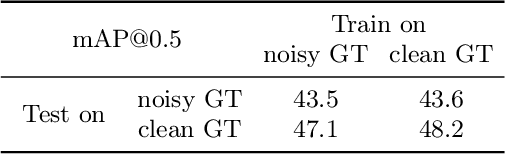
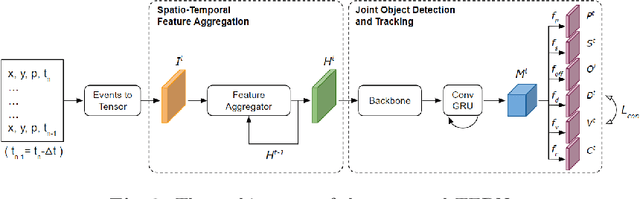
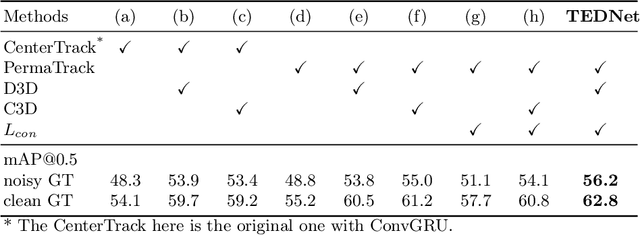
Event-based object detection has recently garnered attention in the computer vision community due to the exceptional properties of event cameras, such as high dynamic range and no motion blur. However, feature asynchronism and sparsity cause invisible objects due to no relative motion to the camera, posing a significant challenge in the task. Prior works have studied various memory mechanisms to preserve as many features as possible at the current time, guided by temporal clues. While these implicit-learned memories retain some short-term information, they still struggle to preserve long-term features effectively. In this paper, we consider those invisible objects as pseudo-occluded objects and aim to reveal their features. Firstly, we introduce visibility attribute of objects and contribute an auto-labeling algorithm to append additional visibility labels on an existing event camera dataset. Secondly, we exploit tracking strategies for pseudo-occluded objects to maintain their permanence and retain their bounding boxes, even when features have not been available for a very long time. These strategies can be treated as an explicit-learned memory guided by the tracking objective to record the displacements of objects across frames. Lastly, we propose a spatio-temporal feature aggregation module to enrich the latent features and a consistency loss to increase the robustness of the overall pipeline. We conduct comprehensive experiments to verify our method's effectiveness where still objects are retained but real occluded objects are discarded. The results demonstrate that (1) the additional visibility labels can assist in supervised training, and (2) our method outperforms state-of-the-art approaches with a significant improvement of 7.9% absolute mAP.