 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust One-shot Task Execution using Knowledge Graph Embeddings
Paper and Code
May 10, 2021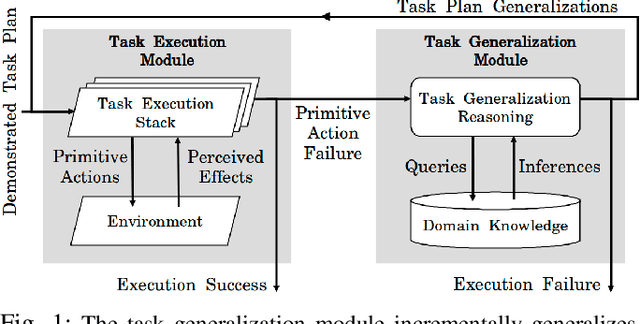
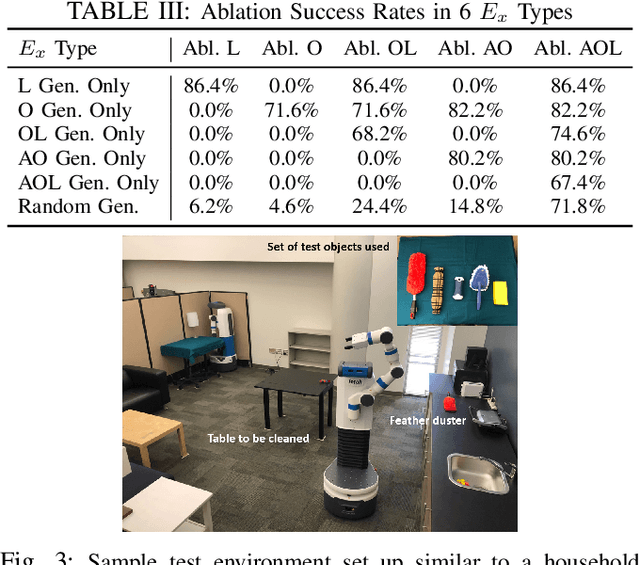
Requiring multiple demonstrations of a task plan presents a burden to end-users of robots. However, robustly executing tasks plans from a single end-user demonstration is an ongoing challenge in robotics. We address the problem of one-shot task execution, in which a robot must generalize a single demonstration or prototypical example of a task plan to a new execution environment. Our approach integrates task plans with domain knowledge to infer task plan constituents for new execution environments. Our experimental evaluations show that our knowledge representation makes more relevant generalizations that result in significantly higher success rates over tested baselines. We validated the approach on a physical platform, which resulted in the successful generalization of initial task plans to 38 of 50 execution environments with errors resulting from autonomous robot operation included.