 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust 3D Object Recognition with Dense-to-Sparse Deep Domain Adaptation
Paper and Code
May 07, 2022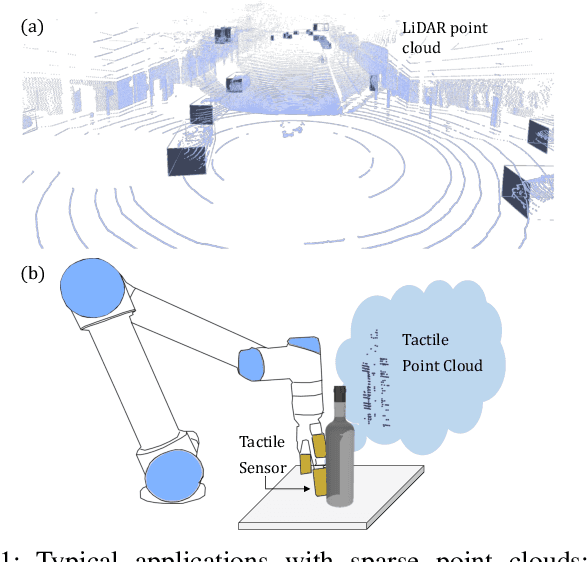
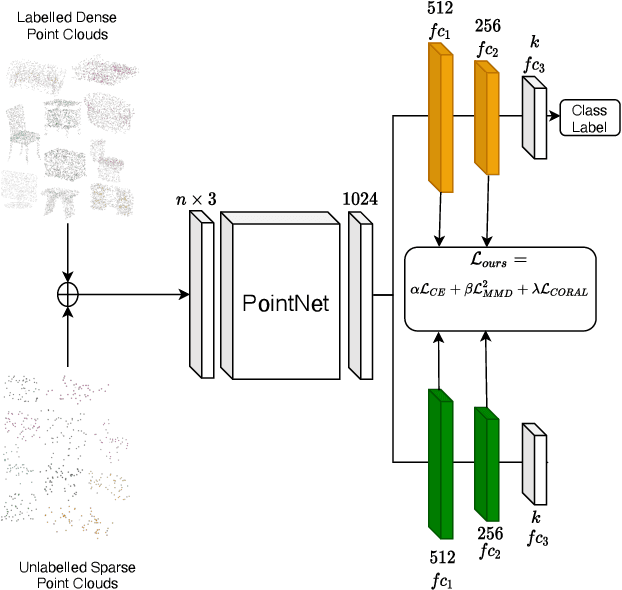
Three-dimensional (3D) object recognition is crucial for intelligent autonomous agents such as autonomous vehicles and robots alike to operate effectively in unstructured environments. Most state-of-art approaches rely on relatively dense point clouds and performance drops significantly for sparse point clouds. Unsupervised domain adaption allows to minimise the discrepancy between dense and sparse point clouds with minimal unlabelled sparse point clouds, thereby saving additional sparse data collection, annotation and retraining costs. In this work, we propose a novel method for point cloud based object recognition with competitive performance with state-of-art methods on dense and sparse point clouds while being trained only with dense point clouds.