 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Plastic and Stable Exemplar-Free Incremental Learning: A Dual-Learner Framework with Cumulative Parameter Averaging
Paper and Code
Oct 28, 2023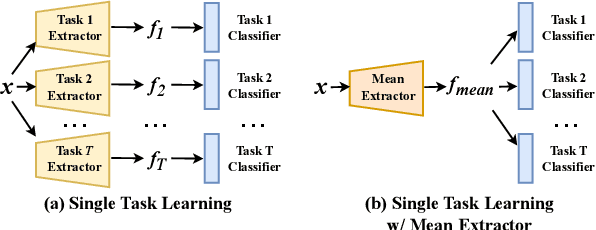

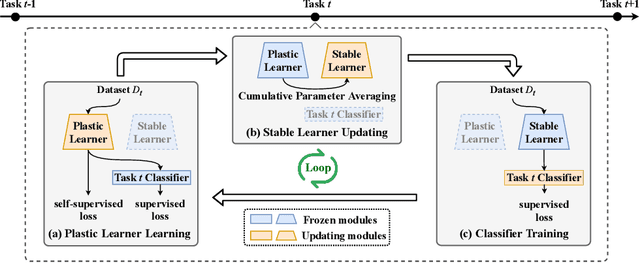
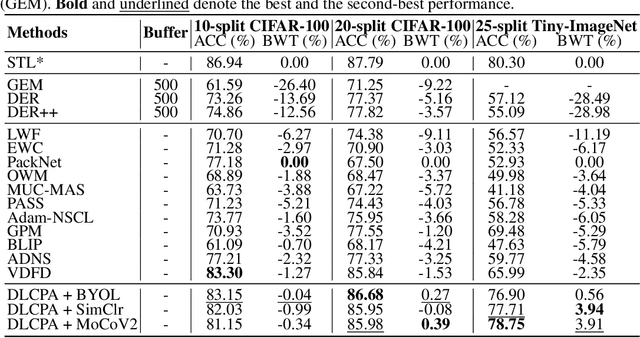
The dilemma between plasticity and stability presents a significant challenge in Incremental Learning (IL), especially in the exemplar-free scenario where accessing old-task samples is strictly prohibited during the learning of a new task. A straightforward solution to this issue is learning and storing an independent model for each task, known as Single Task Learning (STL). Despite the linear growth in model storage with the number of tasks in STL, we empirically discover that averaging these model parameters can potentially preserve knowledge across all tasks. Inspired by this observation, we propose a Dual-Learner framework with Cumulative Parameter Averaging (DLCPA). DLCPA employs a dual-learner design: a plastic learner focused on acquiring new-task knowledge and a stable learner responsible for accumulating all learned knowledge. The knowledge from the plastic learner is transferred to the stable learner via cumulative parameter averaging. Additionally, several task-specific classifiers work in cooperation with the stable learner to yield the final prediction. Specifically, when learning a new task, these modules are updated in a cyclic manner: i) the plastic learner is initially optimized using a self-supervised loss besides the supervised loss to enhance the feature extraction robustness; ii) the stable learner is then updated with respect to the plastic learner in a cumulative parameter averaging manner to maintain its task-wise generalization; iii) the task-specific classifier is accordingly optimized to align with the stable learner. Experimental results on CIFAR-100 and Tiny-ImageNet show that DLCPA outperforms several state-of-the-art exemplar-free baselines in both Task-IL and Class-IL settings.