 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Optimal Correlational Object Search
Paper and Code
Oct 19, 2021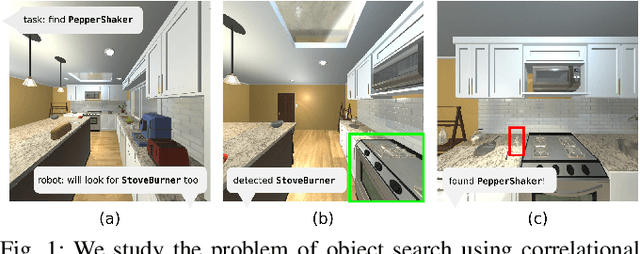
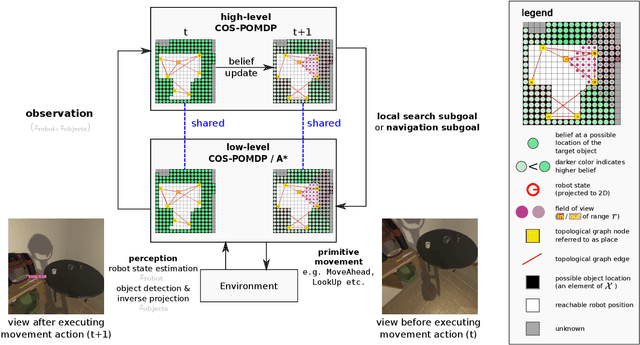
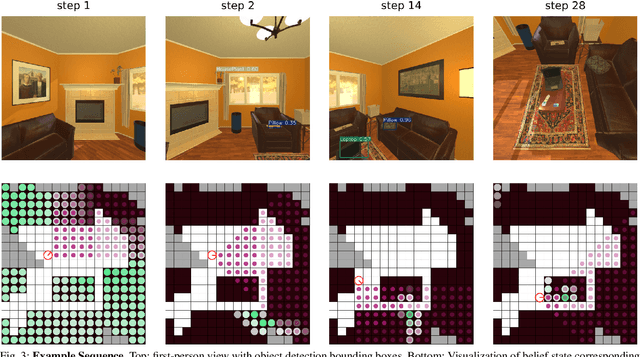
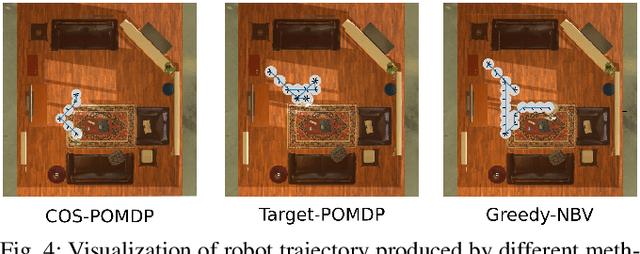
In realistic applications of object search, robots will need to locate target objects in complex environments while coping with unreliable sensors, especially for small or hard-to-detect objects. In such settings, correlational information can be valuable for planning efficiently: when looking for a fork, the robot could start by locating the easier-to-detect refrigerator, since forks would probably be found nearby. Previous approaches to object search with correlational information typically resort to ad-hoc or greedy search strategies. In this paper, we propose the Correlational Object Search POMDP (COS-POMDP), which can be solved to produce search strategies that use correlational information. COS-POMDPs contain a correlation-based observation model that allows us to avoid the exponential blow-up of maintaining a joint belief about all objects, while preserving the optimal solution to this naive, exponential POMDP formulation. We propose a hierarchical planning algorithm to scale up COS-POMDP for practical domains. We conduct experiments using AI2-THOR, a realistic simulator of household environments, as well as YOLOv5, a widely-used object detector. Our results show that, particularly for hard-to-detect objects, such as scrub brush and remote control, our method offers the most robust performance compared to baselines that ignore correlations as well as a greedy, next-best view approach.