 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards human-agent knowledge fusion (HAKF) in support of distributed coalition teams
Paper and Code
Oct 23, 2020
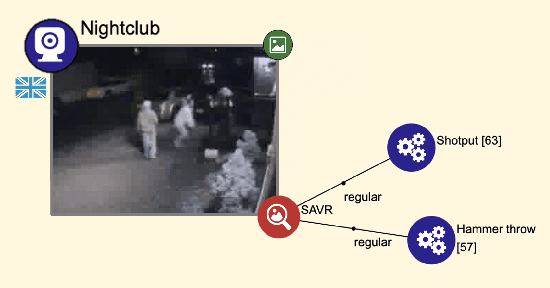
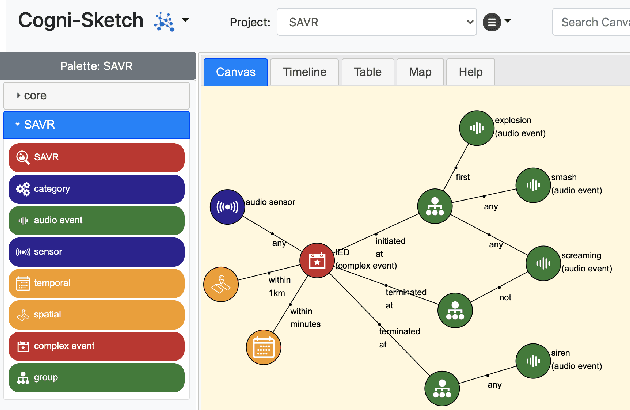
Future coalition operations can be substantially augmented through agile teaming between human and machine agents, but in a coalition context these agents may be unfamiliar to the human users and expected to operate in a broad set of scenarios rather than being narrowly defined for particular purposes. In such a setting it is essential that the human agents can rapidly build trust in the machine agents through appropriate transparency of their behaviour, e.g., through explanations. The human agents are also able to bring their local knowledge to the team, observing the situation unfolding and deciding which key information should be communicated to the machine agents to enable them to better account for the particular environment. In this paper we describe the initial steps towards this human-agent knowledge fusion (HAKF) environment through a recap of the key requirements, and an explanation of how these can be fulfilled for an example situation. We show how HAKF has the potential to bring value to both human and machine agents working as part of a distributed coalition team in a complex event processing setting with uncertain sources.