 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generalized Robot Assembly through Compliance-Enabled Contact Formations
Paper and Code
Mar 09, 2023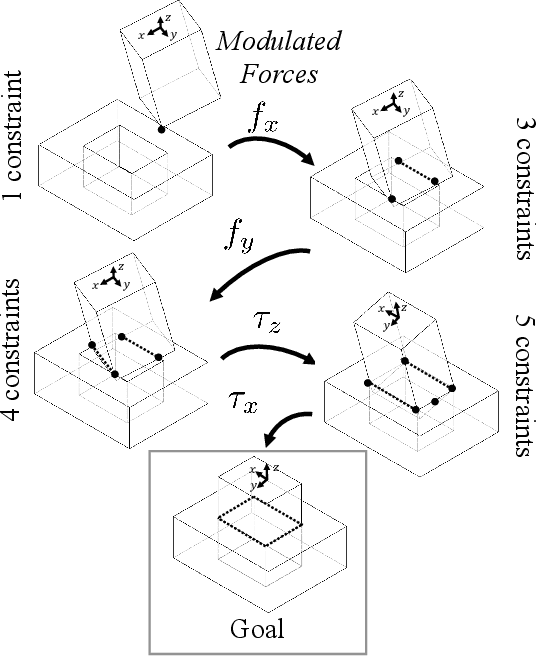
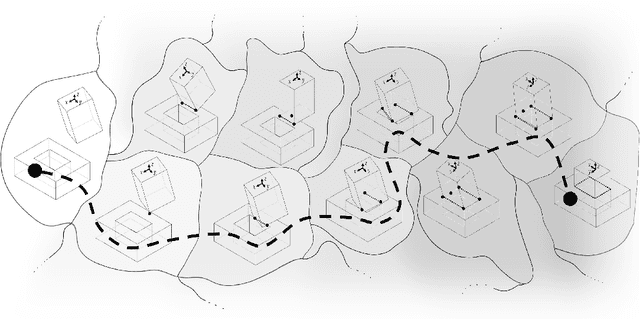
Contact can be conceptualized as a set of constraints imposed on two bodies that are interacting with one another in some way. The nature of a contact, whether a point, line, or surface, dictates how these bodies are able to move with respect to one another given a force, and a set of contacts can provide either partial or full constraint on a body's motion. Decades of work have explored how to explicitly estimate the location of a contact and its dynamics, e.g., frictional properties, but investigated methods have been computationally expensive and there often exists significant uncertainty in the final calculation. This has affected further advancements in contact-rich tasks that are seemingly simple to humans, such as generalized peg-in-hole insertions. In this work, instead of explicitly estimating the individual contact dynamics between an object and its hole, we approach this problem by investigating compliance-enabled contact formations. More formally, contact formations are defined according to the constraints imposed on an object's available degrees-of-freedom. Rather than estimating individual contact positions, we abstract out this calculation to an implicit representation, allowing the robot to either acquire, maintain, or release constraints on the object during the insertion process, by monitoring forces enacted on the end effector through time. Using a compliant robot, our method is desirable in that we are able to complete industry-relevant insertion tasks of tolerances <0.25mm without prior knowledge of the exact hole location or its orientation. We showcase our method on more generalized insertion tasks, such as commercially available non-cylindrical objects and open world plug tasks.