 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Dynamic Simulation Guided Optimal Design of Tumbling Microrobots
Paper and Code
Jul 30, 2019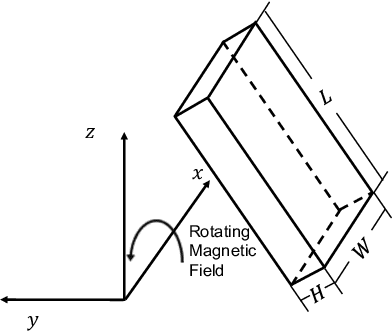

Design of robots at the small scale is a trial-and-error based process, which is costly and time-consuming. There are no good dynamic simulation tools to predict the motion or performance of a microrobot as it moves against a substrate. At smaller length scales, the influence of adhesion and friction, which scales with surface area, becomes more pronounced. Thus, rigid body dynamic simulators, which implicitly assume that contact between two bodies can be modeled as point contact are not suitable. In this paper, we present techniques for simulating the motion of microrobots where there can be intermittent and non-point contact between the robot and the substrate. We use this simulator to study the motion of microrobots of different shapes and select shapes that are most promising for performing a given task.