 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Creating a Deployable Grasp Type Probability Estimator for a Prosthetic Hand
Paper and Code
Jan 13, 2021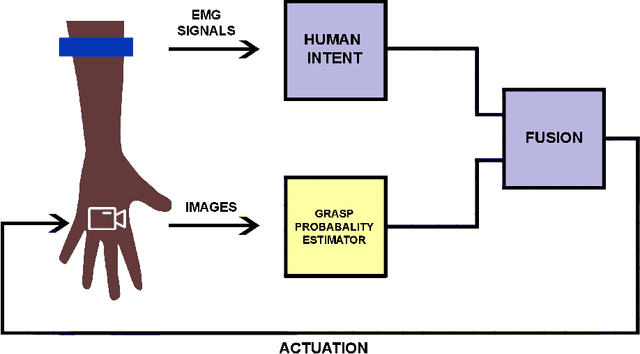
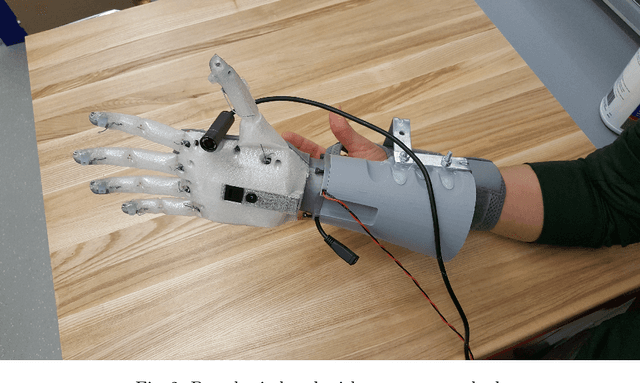
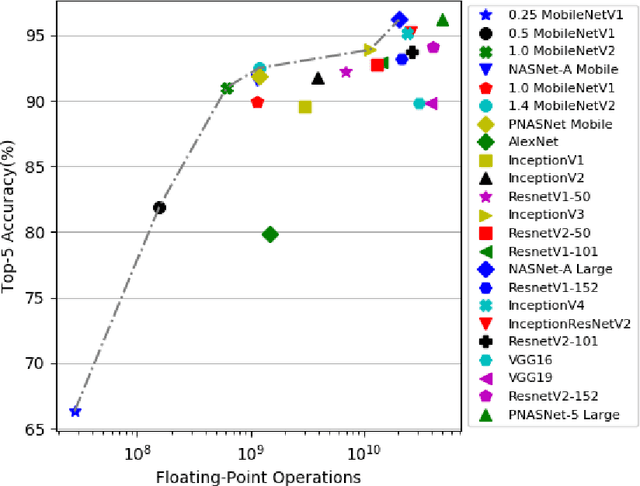
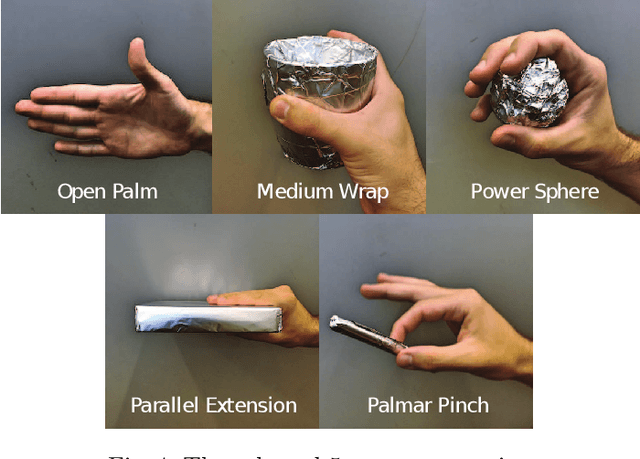
For lower arm amputees, prosthetic hands promise to restore most of physical interaction capabilities. This requires to accurately predict hand gestures capable of grabbing varying objects and execute them timely as intended by the user. Current approaches often rely on physiological signal inputs such as Electromyography (EMG) signal from residual limb muscles to infer the intended motion. However, limited signal quality, user diversity and high variability adversely affect the system robustness. Instead of solely relying on EMG signals, our work enables augmenting EMG intent inference with physical state probability through machine learning and computer vision method. To this end, we: (1) study state-of-the-art deep neural network architectures to select a performant source of knowledge transfer for the prosthetic hand, (2) use a dataset containing object images and probability distribution of grasp types as a new form of labeling where instead of using absolute values of zero and one as the conventional classification labels, our labels are a set of probabilities whose sum is 1. The proposed method generates probabilistic predictions which could be fused with EMG prediction of probabilities over grasps by using the visual information from the palm camera of a prosthetic hand. Our results demonstrate that InceptionV3 achieves highest accuracy with 0.95 angular similarity followed by 1.4 MobileNetV2 with 0.93 at ~20% the amount of operations.