 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological Area Graph Generation and its Application to Path Planning
Paper and Code
Nov 14, 2018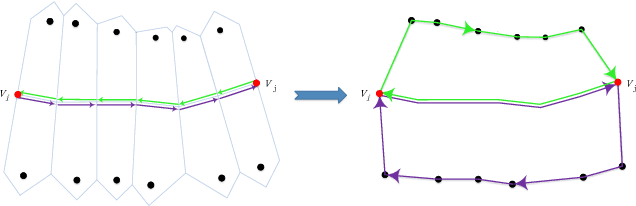



Representing a scanned map of the real environment as a topological structure is an important research in robotics. %is currently an important research. Since topological representations of maps save a huge amount of map storage space and online computing time, they are widely used in fields such as path planning, map matching, and semantic mapping. We propose a novel topological map representation, the Area Graph, in which the vertices represent areas and edges represent passages. The Area Graph is developed from a pruned Voronoi Graph, the Topology Graph. The paper also presents path planning as one application for the Area Graph. For that, we derive a so-called Passage Graph from the Area Graph. Because our algorithm segments the map as a set of areas, the first experiment compares the results of the Area Graph with that of state-of-the-art segmentation approaches, which proved that our method effectively prevented over-segmentation. Then the second experiment shows the superiority of our method over the traditional A* planning algorithm.