 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTITAN: Future Forecast using Action Priors
Paper and Code
Apr 01, 2020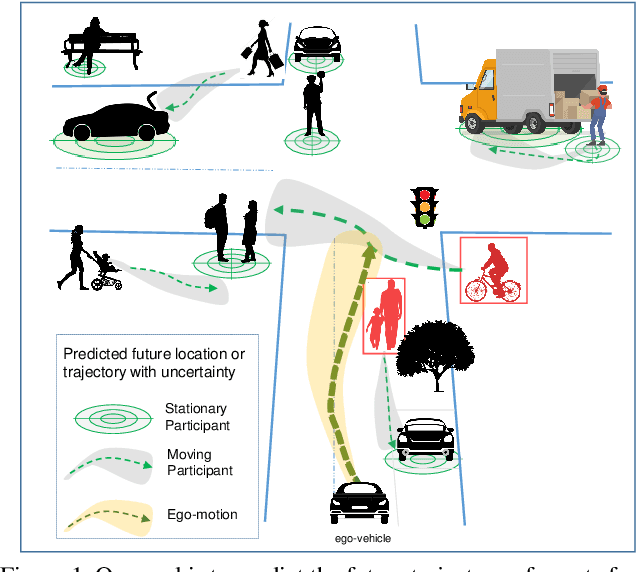
We consider the problem of predicting the future trajectory of scene agents from egocentric views obtained from a moving platform. This problem is important in a variety of domains, particularly for autonomous systems making reactive or strategic decisions in navigation. In an attempt to address this problem, we introduce TITAN (Trajectory Inference using Targeted Action priors Network), a new model that incorporates prior positions, actions, and context to forecast future trajectory of agents and future ego-motion. In the absence of an appropriate dataset for this task, we created the TITAN dataset that consists of 700 labeled video-clips (with odometry) captured from a moving vehicle on highly interactive urban traffic scenes in Tokyo. Our dataset includes 50 labels including vehicle states and actions, pedestrian age groups, and targeted pedestrian action attributes that are organized hierarchically corresponding to atomic, simple/complex-contextual, transportive, and communicative actions. To evaluate our model, we conducted extensive experiments on the TITAN dataset, revealing significant performance improvement against baselines and state-of-the-art algorithms. We also report promising results from our Agent Importance Mechanism (AIM), a module which provides insight into assessment of perceived risk by calculating the relative influence of each agent on the future ego-trajectory. The dataset is available at https://usa.honda-ri.com/titan