 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTIP: Task-Informed Motion Prediction for Intelligent Systems
Paper and Code
Oct 17, 2021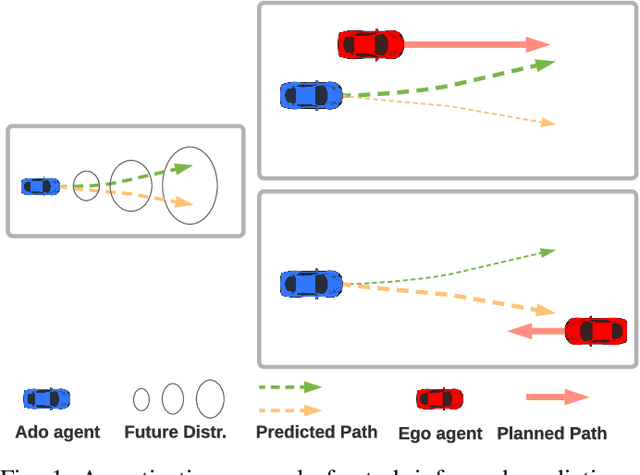
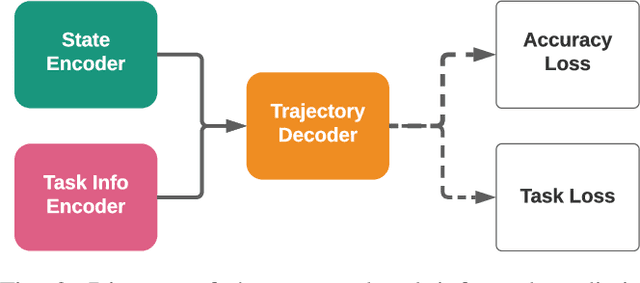
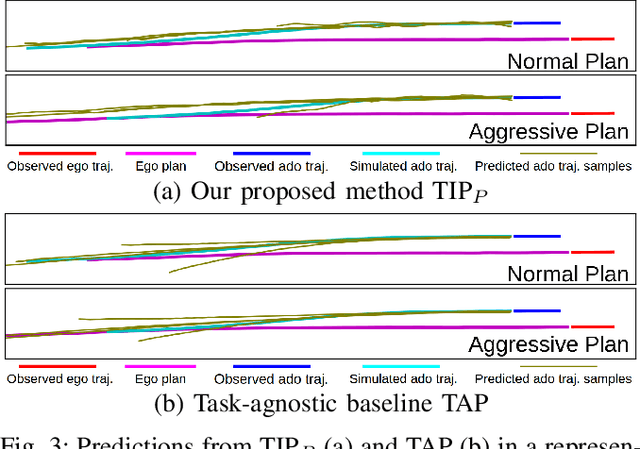
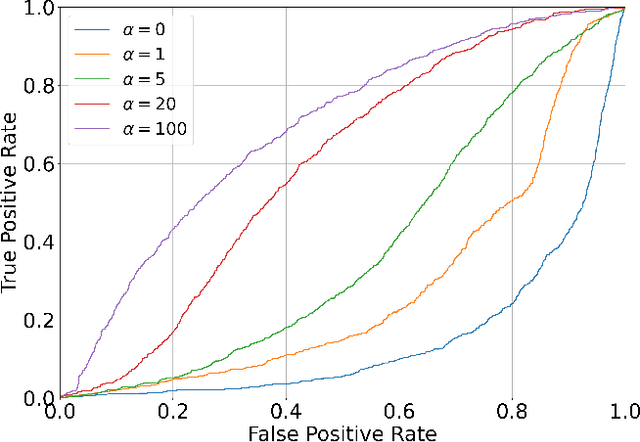
Motion prediction is important for intelligent driving systems, providing the future distributions of road agent behaviors and supporting various decision making tasks. Existing motion predictors are often optimized and evaluated via task-agnostic measures based on prediction accuracy. Such measures fail to account for the use of prediction in downstream tasks, and could result in sub-optimal task performance. We propose a task-informed motion prediction framework that jointly reasons about prediction accuracy and task utility, to better support downstream tasks through its predictions. The task utility function does not require the full task information, but rather a specification of the utility of the task, resulting in predictors that serve a wide range of downstream tasks. We demonstrate our framework on two use cases of task utilities, in the context of autonomous driving and parallel autonomy, and show the advantage of task-informed predictors over task-agnostic ones on the Waymo Open Motion dataset.