 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTigris: Architecture and Algorithms for 3D Perception in Point Clouds
Paper and Code
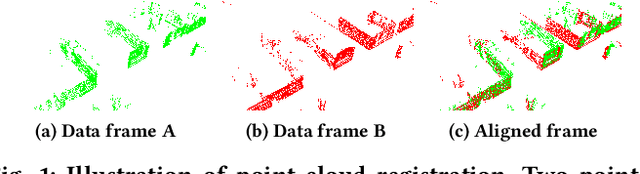
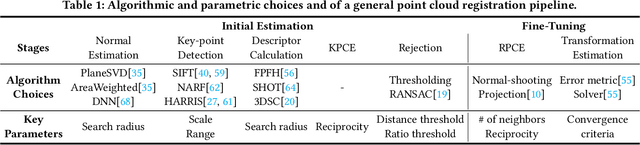

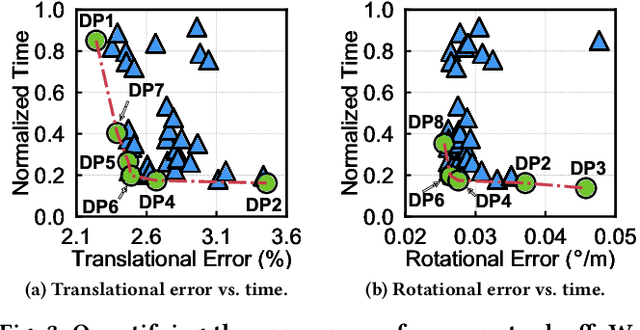
Machine perception applications are increasingly moving toward manipulating and processing 3D point cloud. This paper focuses on point cloud registration, a key primitive of 3D data processing widely used in high-level tasks such as odometry, simultaneous localization and mapping, and 3D reconstruction. As these applications are routinely deployed in energy-constrained environments, real-time and energy-efficient point cloud registration is critical. We present Tigris, an algorithm-architecture co-designed system specialized for point cloud registration. Through an extensive exploration of the registration pipeline design space, we find that, while different design points make vastly different trade-offs between accuracy and performance, KD-tree search is a common performance bottleneck, and thus is an ideal candidate for architectural specialization. While KD-tree search is inherently sequential, we propose an acceleration-amenable data structure and search algorithm that exposes different forms of parallelism of KD-tree search in the context of point cloud registration. The co-designed accelerator systematically exploits the parallelism while incorporating a set of architectural techniques that further improve the accelerator efficiency. Overall, Tigris achieves 77.2$\times$ speedup and 7.4$\times$ power reduction in KD-tree search over an RTX 2080 Ti GPU, which translates to a 41.7% registration performance improvements and 3.0$\times$ power reduction.