 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThinking Inside the Ball: Near-Optimal Minimization of the Maximal Loss
Paper and Code
May 04, 2021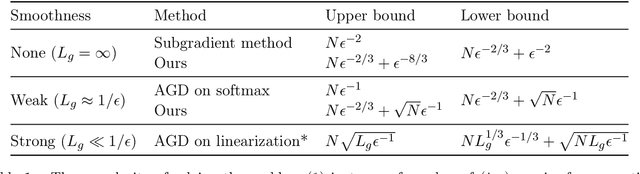
We characterize the complexity of minimizing $\max_{i\in[N]} f_i(x)$ for convex, Lipschitz functions $f_1,\ldots, f_N$. For non-smooth functions, existing methods require $O(N\epsilon^{-2})$ queries to a first-order oracle to compute an $\epsilon$-suboptimal point and $\tilde{O}(N\epsilon^{-1})$ queries if the $f_i$ are $O(1/\epsilon)$-smooth. We develop methods with improved complexity bounds of $\tilde{O}(N\epsilon^{-2/3} + \epsilon^{-8/3})$ in the non-smooth case and $\tilde{O}(N\epsilon^{-2/3} + \sqrt{N}\epsilon^{-1})$ in the $O(1/\epsilon)$-smooth case. Our methods consist of a recently proposed ball optimization oracle acceleration algorithm (which we refine) and a careful implementation of said oracle for the softmax function. We also prove an oracle complexity lower bound scaling as $\Omega(N\epsilon^{-2/3})$, showing that our dependence on $N$ is optimal up to polylogarithmic factors.