 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV inspection
Paper and Code
Feb 02, 2022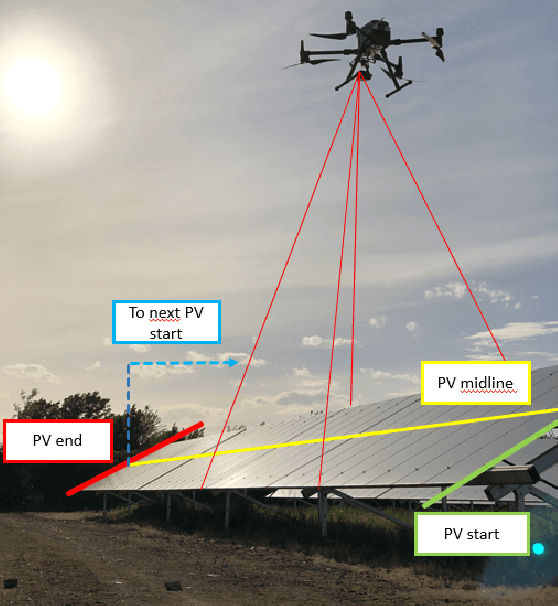
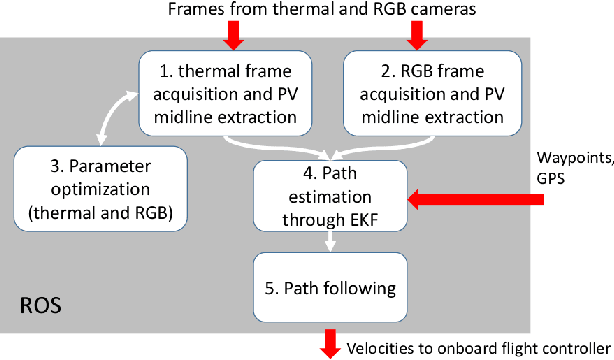
Since the demand for renewable solar energy is continuously growing, the need for more frequent, precise, and quick autonomous aerial inspections using Unmanned Aerial Vehicles (UAV) may become fundamental to reduce costs. However, UAV-based inspection of Photovoltaic (PV) arrays is still an open problem. Companies in the field complain that GPS-based navigation is not adequate to accurately cover PV arrays to acquire images to be analyzed to determine the PV panels' status. Indeed, when instructing UAVs to move along a sequency of waypoints at a low altitude, two sources of errors may deteriorate performances: (i) the difference between the actual UAV position and the one estimated with the GPS, and (ii) the difference between the UAV position returned by the GPS and the position of waypoints extracted from georeferenced images acquired through Google Earth or similar tools. These errors make it impossible to reliably track rows of PV modules without human intervention reliably. The article proposes an approach for inspecting PV arrays with autonomous UAVs equipped with an RGB and a thermal camera, the latter being typically used to detect heat failures on the panels' surface: we introduce a portfolio of techniques to process data from both cameras for autonomous navigation. %, including an optimization procedure for improving panel detection and an Extended Kalman Filter (EKF) to filter data from RGB and thermal cameras. Experimental tests performed in simulation and an actual PV plant are reported, confirming the validity of the approach.