 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Use of Implicit Human Motor Behaviour in the Online Personalisation of Prosthetic Interfaces
Paper and Code
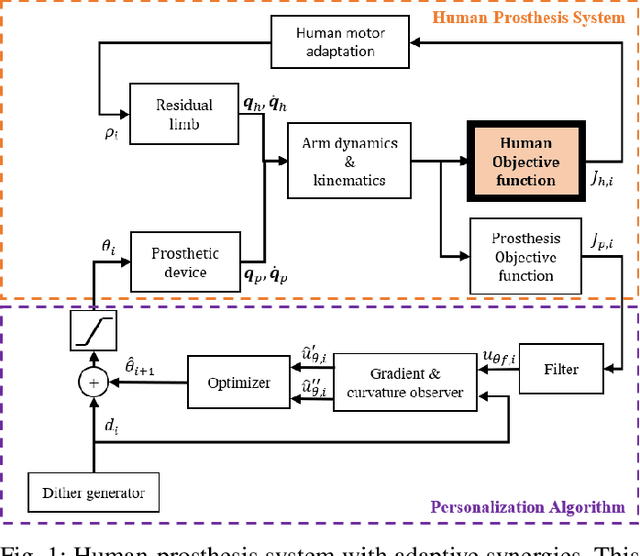
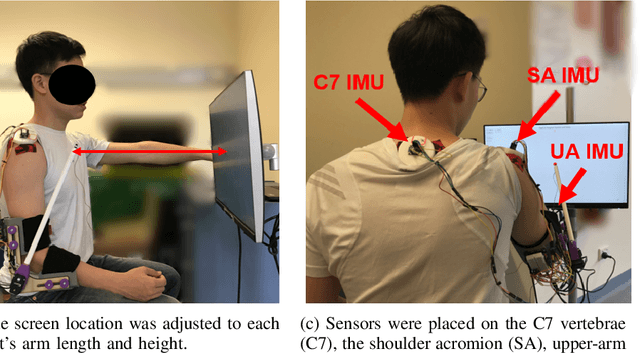
In previous work, the authors proposed a data-driven optimisation algorithm for the personalisation of human-prosthetic interfaces, demonstrating the possibility of adapting prosthesis behaviour to its user while the user performs tasks with it. This method requires that the human and the prosthesis personalisation algorithm have same pre-defined objective function. This was previously ensured by providing the human with explicit feedback on what the objective function is. However, constantly displaying this information to the prosthesis user is impractical. Moreover, the method utilised task information in the objective function which may not be available from the wearable sensors typically used in prosthetic applications. In this work, the previous approach is extended to use a prosthesis objective function based on implicit human motor behaviour, which represents able-bodied human motor control and is measureable using wearable sensors. The approach is tested in a hardware implementation of the personalisation algorithm on a prosthetic elbow, where the prosthetic objective function is a function of upper-body compensation, and is measured using wearable IMUs. Experimental results on able-bodied subjects using a supernumerary prosthetic elbow mounted on an elbow orthosis suggest that it is possible to use a prosthesis objective function which is implicit in human behaviour to achieve collaboration without providing explicit feedback to the human, motivating further studies.