 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe troublesome kernel: why deep learning for inverse problems is typically unstable
Paper and Code
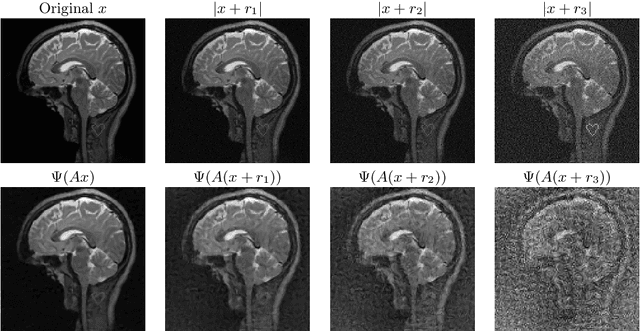
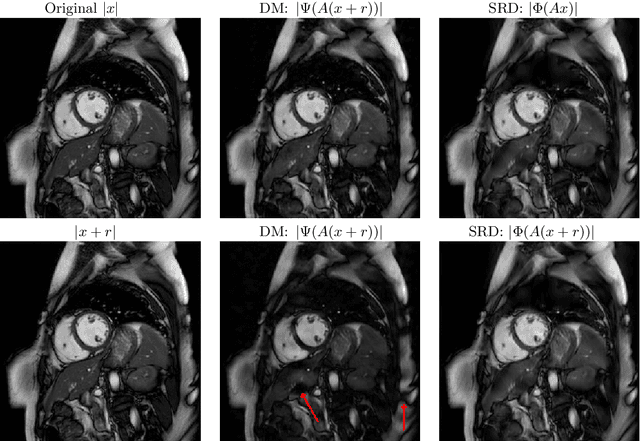
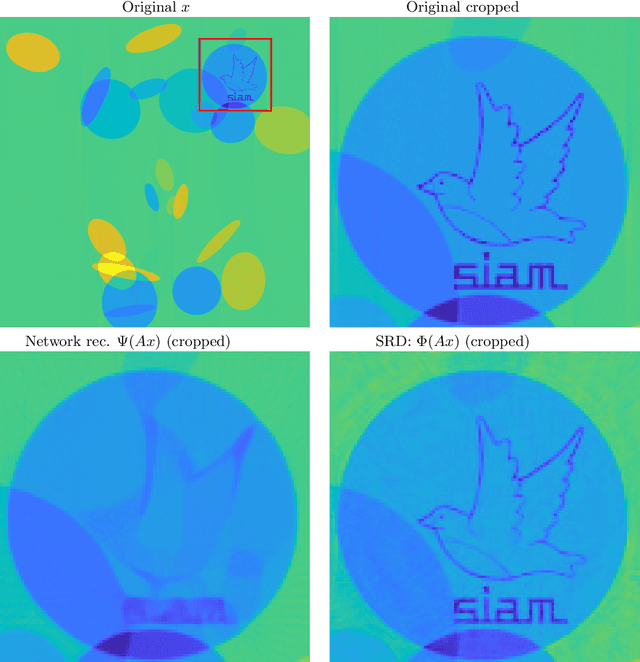
There is overwhelming empirical evidence that Deep Learning (DL) leads to unstable methods in applications ranging from image classification and computer vision to voice recognition and automated diagnosis in medicine. Recently, a similar instability phenomenon has been discovered when DL is used to solve certain problems in computational science, namely, inverse problems in imaging. In this paper we present a comprehensive mathematical analysis explaining the many facets of the instability phenomenon in DL for inverse problems. Our main results not only explain why this phenomenon occurs, they also shed light as to why finding a cure for instabilities is so difficult in practice. Additionally, these theorems show that instabilities are typically not rare events - rather, they can occur even when the measurements are subject to completely random noise - and consequently how easy it can be to destablise certain trained neural networks. We also examine the delicate balance between reconstruction performance and stability, and in particular, how DL methods may outperform state-of-the-art sparse regularization methods, but at the cost of instability. Finally, we demonstrate a counterintuitive phenomenon: training a neural network may generically not yield an optimal reconstruction method for an inverse problem.