 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Measurement Uncertainty in Optimal Control for Contact Interactions
Paper and Code
Jan 16, 2018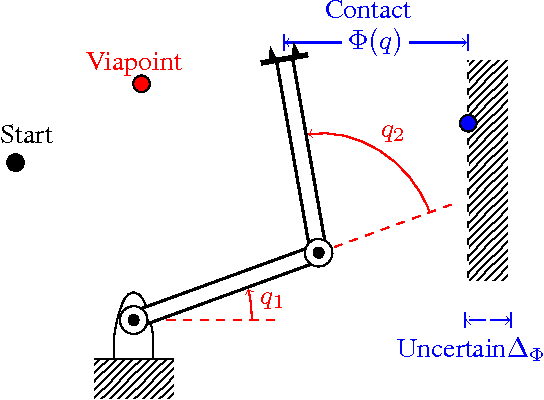
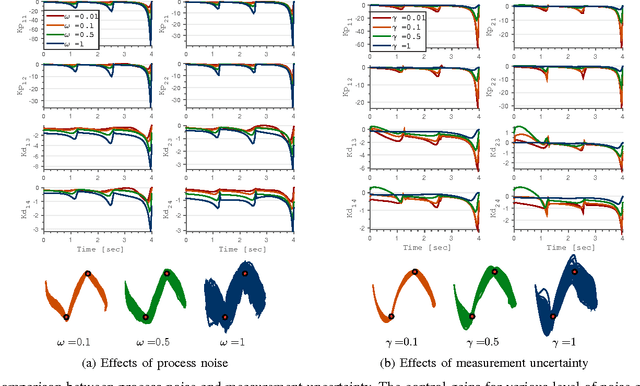
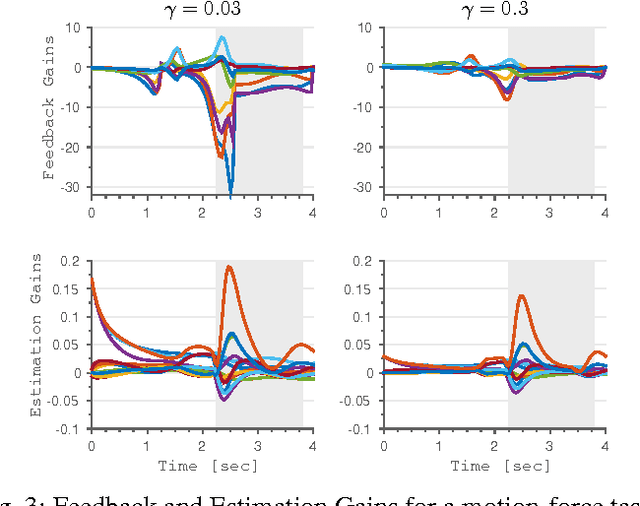
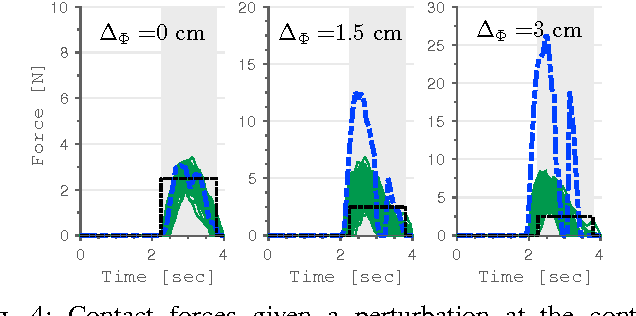
Stochastic Optimal Control (SOC) typically considers noise only in the process model, i.e. unknown disturbances. However, in many robotic applications that involve interaction with the environment, such as locomotion and manipulation, uncertainty also comes from lack of precise knowledge of the world, which is not an actual disturbance. We develop a computationally efficient SOC algorithm, based on risk-sensitive control, that takes into account uncertainty in the measurements. We include the dynamics of an observer in such a way that the control law explicitly depends on the current measurement uncertainty. We show that high measurement uncertainty leads to low impedance behaviors, a result in contrast with the effects of process noise variance that creates stiff behaviors. Simulation results on a simple 2D manipulator show that our controller can create better interaction with the environment under uncertain contact locations than traditional SOC approaches.