 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Revisiting Problem in Mobile Robot Map Building: A Hierarchical Bayesian Approach
Paper and Code
Oct 19, 2012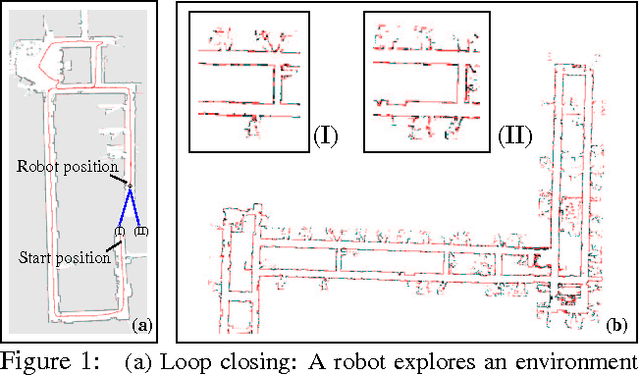
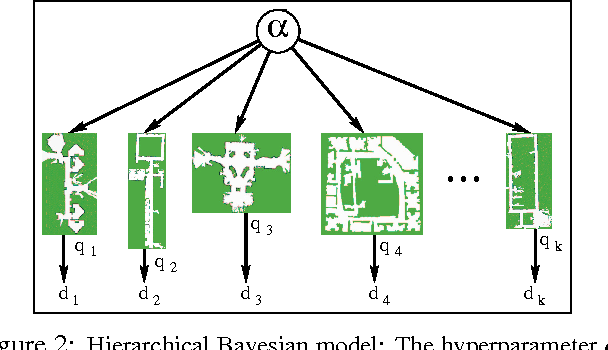
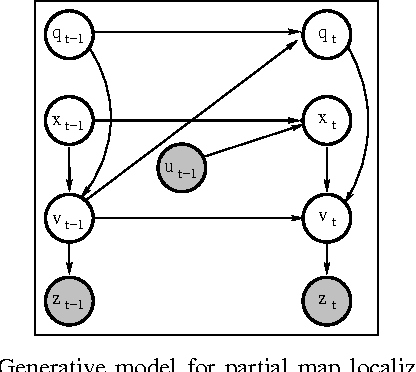
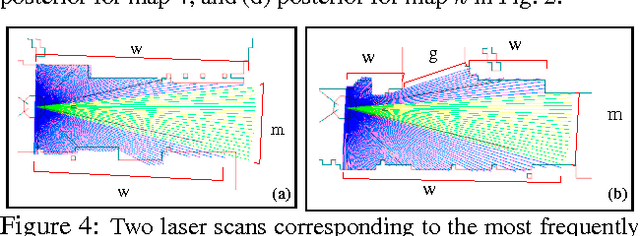
We present an application of hierarchical Bayesian estimation to robot map building. The revisiting problem occurs when a robot has to decide whether it is seeing a previously-built portion of a map, or is exploring new territory. This is a difficult decision problem, requiring the probability of being outside of the current known map. To estimate this probability, we model the structure of a "typical" environment as a hidden Markov model that generates sequences of views observed by a robot navigating through the environment. A Dirichlet prior over structural models is learned from previously explored environments. Whenever a robot explores a new environment, the posterior over the model is estimated by Dirichlet hyperparameters. Our approach is implemented and tested in the context of multi-robot map merging, a particularly difficult instance of the revisiting problem. Experiments with robot data show that the technique yields strong improvements over alternative methods.