 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Reach-Avoid Problem for Constant-Rate Multi-Mode Systems
Paper and Code

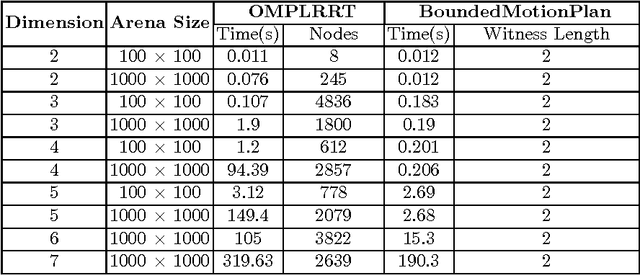
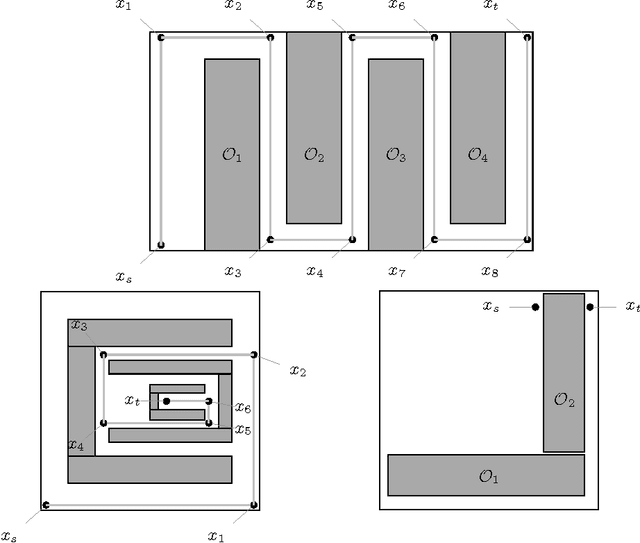

A constant-rate multi-mode system is a hybrid system that can switch freely among a finite set of modes, and whose dynamics is specified by a finite number of real-valued variables with mode-dependent constant rates. Alur, Wojtczak, and Trivedi have shown that reachability problems for constant-rate multi-mode systems for open and convex safety sets can be solved in polynomial time. In this paper, we study the reachability problem for non-convex state spaces and show that this problem is in general undecidable. We recover decidability by making certain assumptions about the safety set. We present a new algorithm to solve this problem and compare its performance with the popular sampling based algorithm rapidly-exploring random tree (RRT) as implemented in the Open Motion Planning Library (OMPL).