 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset
Paper and Code
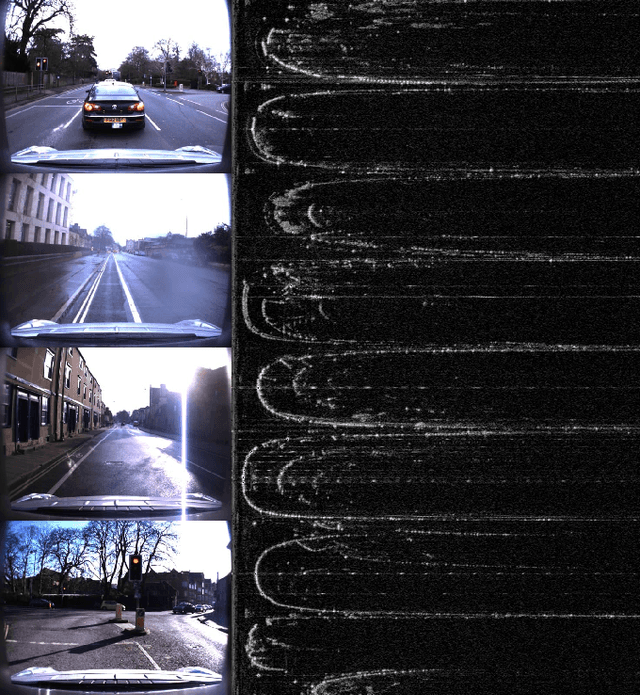
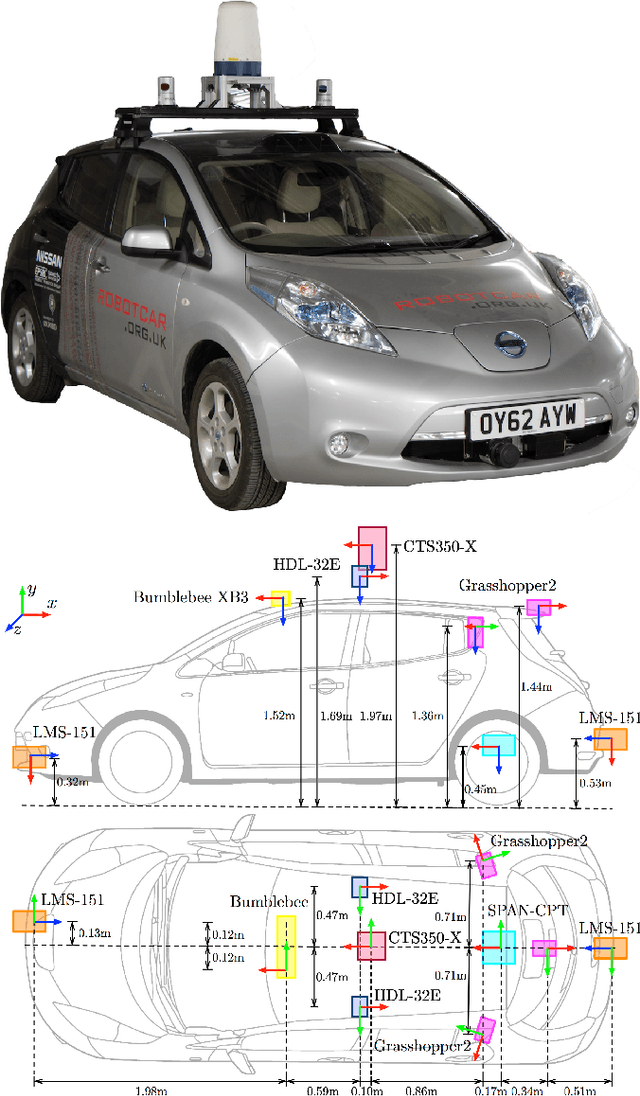
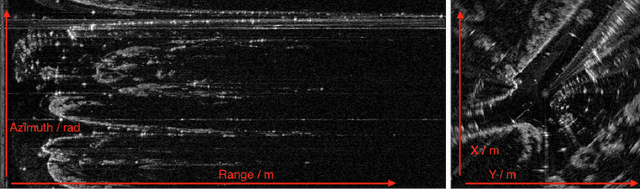
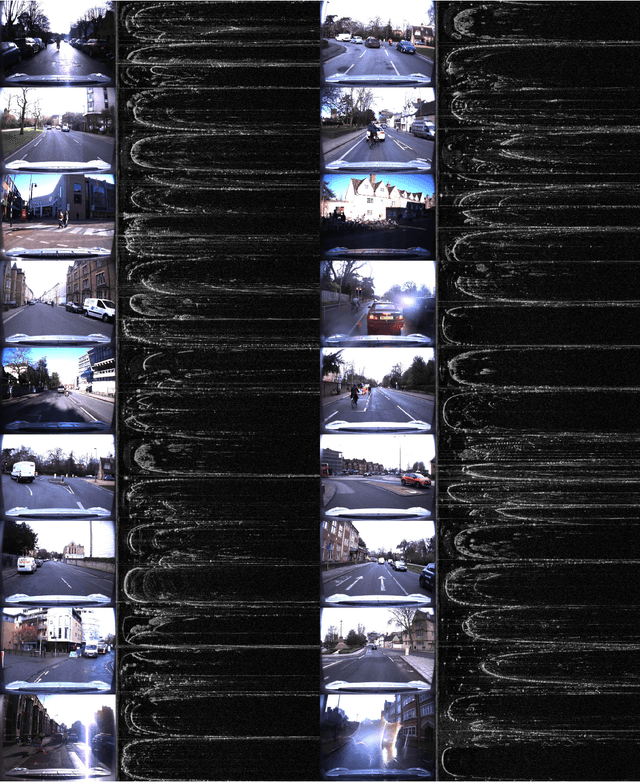
In this paper we present The Oxford Radar RobotCar Dataset, a new dataset for researching scene understanding using Millimetre-Wave FMCW scanning radar data. The target application is autonomous vehicles where this modality remains unencumbered by environmental conditions such as fog, rain, snow, or lens flare, which typically challenge other sensor modalities such as vision and LIDAR. The data were gathered in January 2019 over thirty-two traversals of a central Oxford route spanning a total of 280 km of urban driving. It encompasses a variety of weather, traffic, and lighting conditions. This 4.7 TB dataset consists of over 240,000 scans from a Navtech CTS350-X radar and 2.4 million scans from two Velodyne HDL-32E 3D LIDARs; along with six cameras, two 2D LIDARs, and a GPS/INS receiver. In addition we release ground truth optimised radar odometry to provide an additional impetus to research in this domain. The full dataset is available for download at: ori.ox.ac.uk/datasets/radar-robotcar-dataset