 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Journey is the Reward: Unsupervised Learning of Influential Trajectories
Paper and Code
May 22, 2019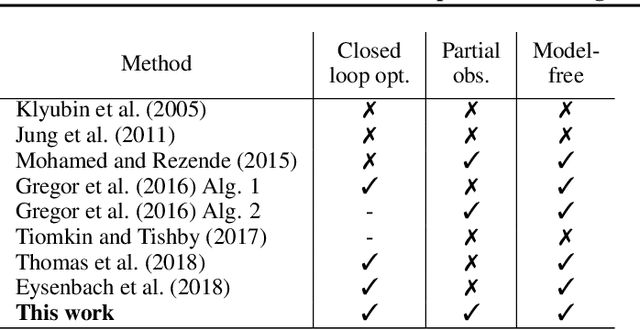
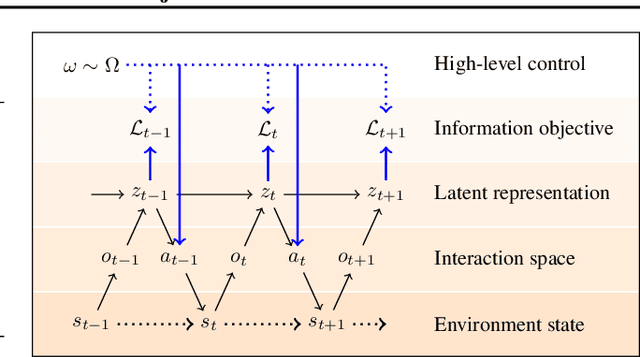
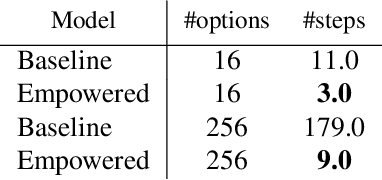
Unsupervised exploration and representation learning become increasingly important when learning in diverse and sparse environments. The information-theoretic principle of empowerment formalizes an unsupervised exploration objective through an agent trying to maximize its influence on the future states of its environment. Previous approaches carry certain limitations in that they either do not employ closed-loop feedback or do not have an internal state. As a consequence, a privileged final state is taken as an influence measure, rather than the full trajectory. We provide a model-free method which takes into account the whole trajectory while still offering the benefits of option-based approaches. We successfully apply our approach to settings with large action spaces, where discovery of meaningful action sequences is particularly difficult.