 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Green Choice: Learning and Influencing Human Decisions on Shared Roads
Paper and Code
Apr 10, 2019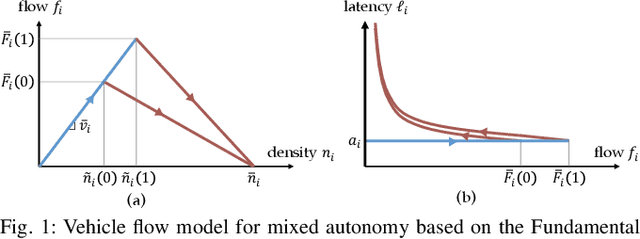
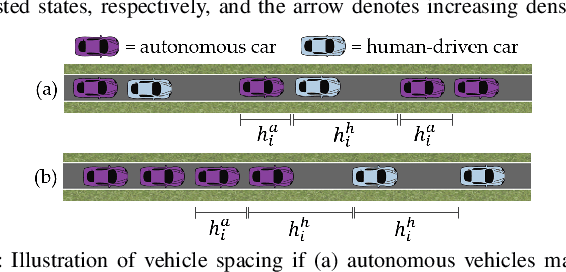
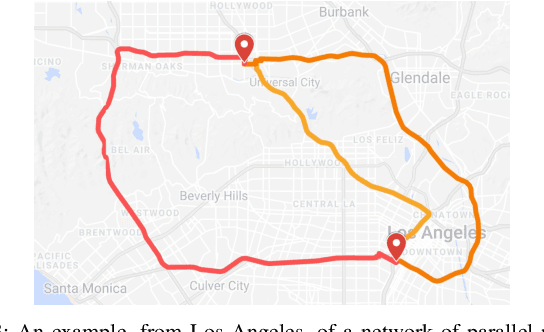
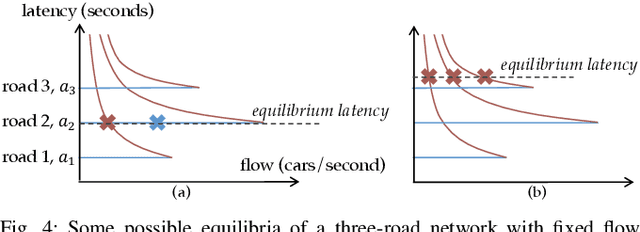
Autonomous vehicles have the potential to increase the capacity of roads via platooning, even when human drivers and autonomous vehicles share roads. However, when users of a road network choose their routes selfishly, the resulting traffic configuration may be very inefficient. Because of this, we consider how to influence human decisions so as to decrease congestion on these roads. We consider a network of parallel roads with two modes of transportation: (i) human drivers who will choose the quickest route available to them, and (ii) ride hailing service which provides an array of autonomous vehicle ride options, each with different prices, to users. In this work, we seek to design these prices so that when autonomous service users choose from these options and human drivers selfishly choose their resulting routes, road usage is maximized and transit delay is minimized. To do so, we formalize a model of how autonomous service users make choices between routes with different price/delay values. Developing a preference-based algorithm to learn the preferences of the users, and using a vehicle flow model related to the Fundamental Diagram of Traffic, we formulate a planning optimization to maximize a social objective and demonstrate the benefit of the proposed routing and learning scheme.