 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Design of Stretch: A Compact, Lightweight Mobile Manipulator for Indoor Human Environments
Paper and Code
Sep 22, 2021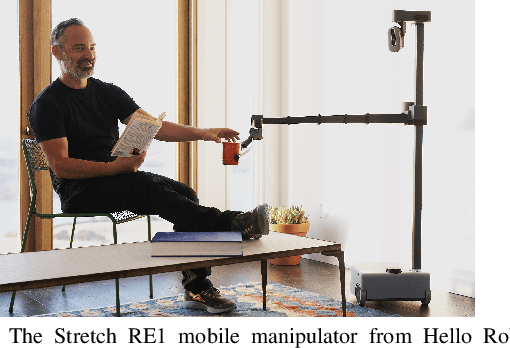
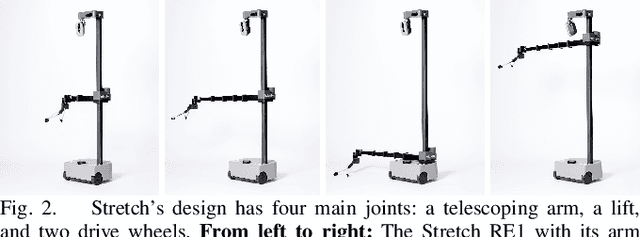

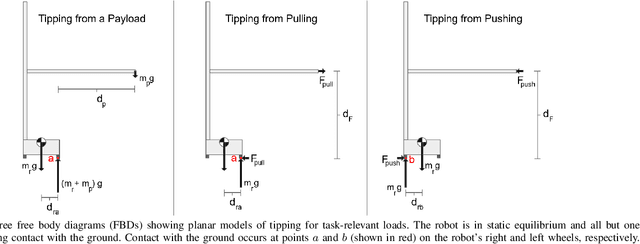
Mobile manipulators for indoor human environments can serve as versatile devices that perform a variety of tasks, yet adoption of this technology has been limited. Reducing size, weight, and cost could facilitate adoption, but risks restricting capabilities. We present a novel design that reduces size, weight, and cost, while still performing a variety of tasks. The core design consists of a two-wheeled differential-drive mobile base, a lift, and a telescoping arm configured to achieve Cartesian motion at the end of the arm. Design extensions include a 1 degree-of-freedom (DOF) wrist to stow a tool, a 2-DOF dexterous wrist to pitch and roll a tool, and a compliant gripper. We justify our design with mathematical models of static stability that relate the robot's size and weight to its workspace, payload, and applied forces. We also provide empirical support by teleoperating and autonomously controlling a commercial robot based on our design (the Stretch RE1 from Hello Robot Inc.) to perform tasks in real homes.