 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Actuation-consistent Wrench Polytope (AWP) and the Feasible Wrench Polytope (FWP)
Paper and Code
Dec 07, 2017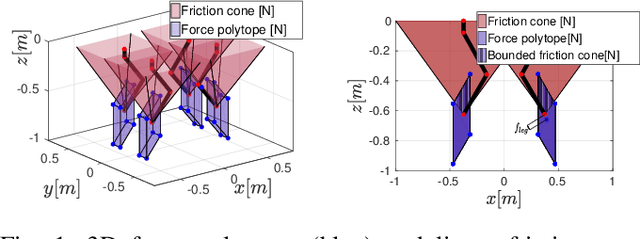
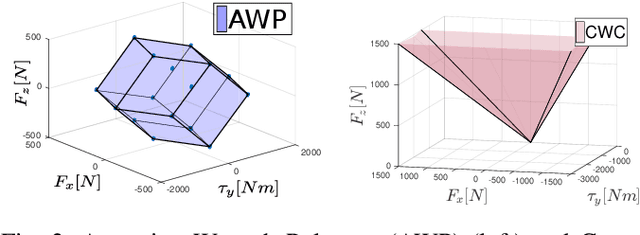
The motivation of our current research is to devise motion planners for legged locomotion that are able to exploit the robot's actuation capabilities. This means, when possible, to minimize joint torques or to propel as much as admissible when required. For this reason we define two new 6 dimensional bounded polytopes that we name Actuation-consistent Wrench Polytope (AWP) and Feasible Wrench Polytope (FWP). These objects turn out to be very useful in motion planning for the definition of constraints on the accelerations of the Center of Mass of the robot that respect the friction cones and the actuation limits. The AWP and the FWP could be used also in the robot design phase to size the actuators of the system based on some predefined reference motion.