 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTesting Robot System Safety by creating Hazardous Human Worker Behavior in Simulation
Paper and Code
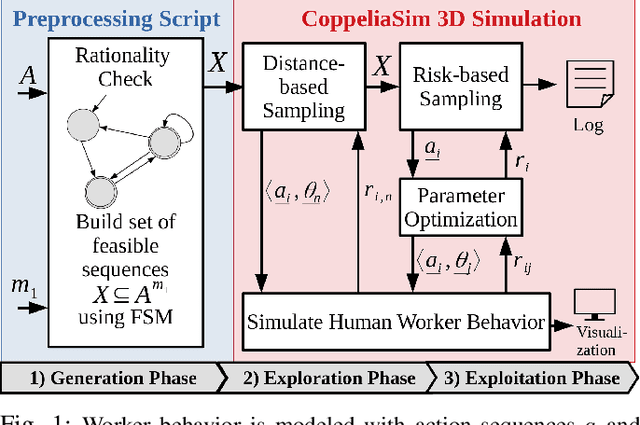

We introduce a novel simulation-based approach to identify hazards that result from unexpected worker behavior in human-robot collaboration. Simulation-based safety testing must take into account the fact that human behavior is variable and that human error can occur. When only the expected worker behavior is simulated, critical hazards can remain undiscovered. On the other hand, simulating all possible worker behaviors is computationally infeasible. This raises the problem of how to find interesting (i.e., potentially hazardous) worker behaviors given a limited number of simulation runs. We frame this as a search problem in the space of possible worker behaviors. Because this search space can get quite complex, we introduce the following measures: (1) Search space restriction based on workflow-constraints, (2) prioritization of behaviors based on how far they deviate from the nominal behavior, and (3) the use of a risk metric to guide the search towards high-risk behaviors which are more likely to expose hazards. We demonstrate the approach in a collaborative workflow scenario that involves a human worker, a robot arm, and a mobile robot.