 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally Robust Multi-Agent STL Motion Planning in Continuous Time
Paper and Code
Oct 16, 2023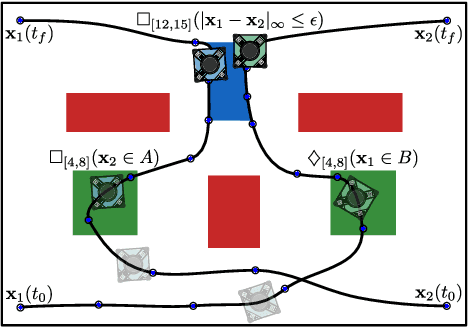
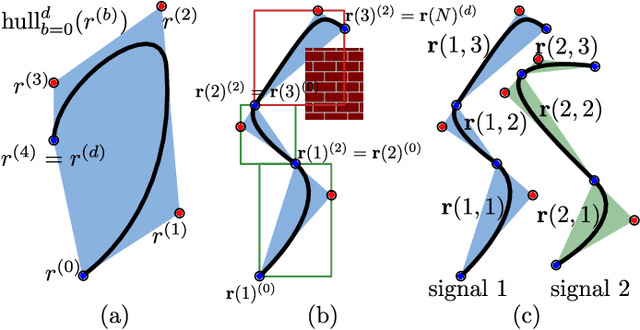
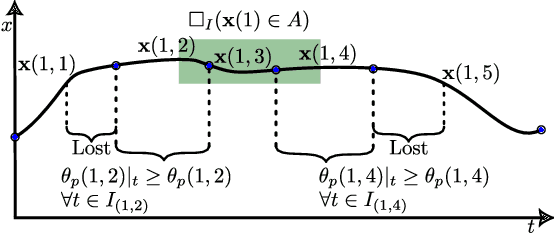
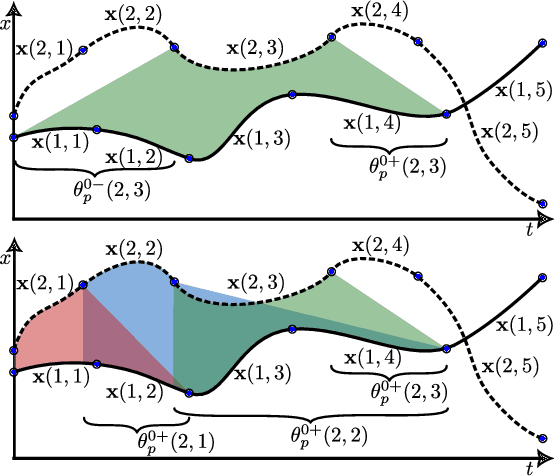
Signal Temporal Logic (STL) is a formal language over continuous-time signals (such as trajectories of a multi-agent system) that allows for the specification of complex spatial and temporal system requirements (such as staying sufficiently close to each other within certain time intervals). To promote robustness in multi-agent motion planning with such complex requirements, we consider motion planning with the goal of maximizing the temporal robustness of their joint STL specification, i.e. maximizing the permissible time shifts of each agent's trajectory while still satisfying the STL specification. Previous methods presented temporally robust motion planning and control in a discrete-time Mixed Integer Linear Programming (MILP) optimization scheme. In contrast, we parameterize the trajectory by continuous B\'ezier curves, where the curvature and the time-traversal of the trajectory are parameterized individually. We show an algorithm generating continuous-time temporally robust trajectories and prove soundness of our approach. Moreover, we empirically show that our parametrization realizes this with a considerable speed-up compared to state-of-the-art methods based on constant interval time discretization.